Connections (example sk 500e, analog input 2), Kty84-130 connection (above software version 1.7), Ain 2 gnd/0v vo 10v – NORD Drivesystems BU0505 User Manual
Page 73: 4 commissioning, P 1 0 2, P 4 0 0, P 1 0 3, P 1 0 4, P 1 0 5, P 4 2 0
4 Commissioning
BU 0505 GB-1013
73
P 0 - -
Display
parameters
_ _ _ _
P 1 - -
Basic parameter
P 2 - -
Motor data
P 4 - -
Control terminals
P 5 - -
Additional
parameter
P 7 - -
Information
A
s
st
an
dar
d,
t
he
ac
tual
out
pu
t
fre
qu
e
nc
y
is
di
spl
ay
e
d
P 1 0 2
Acceleration time
0 ... 320s
M
ot
or
dat
a
S
ee
4.
1
D
ef
a
ul
t
S
et
tings
P 4 0 0
Analog input function
0...10V frequency
Operating value display
(or operational)
following mains ON
P 1 0 3
Deceleration time
0 ... 320s
P 1 0 4
Min. frequency
0 ... 400Hz
P 1 0 5
Max. frequency
0.1 ... 400Hz
P 4 2 0
Digital input function 1
- ON right -
P 5 2 3
=1
Load factory data
Pos : 93 /Anl eitungen/ 4. Inbetriebnahme [ BU 0500]/ 4. 3 KTY84- 130 Ansc hluss (ab Soft ware Version 1. 7) @ 0\ mod_1327570228346_388. doc x @ 7242 @ 255 @ 1
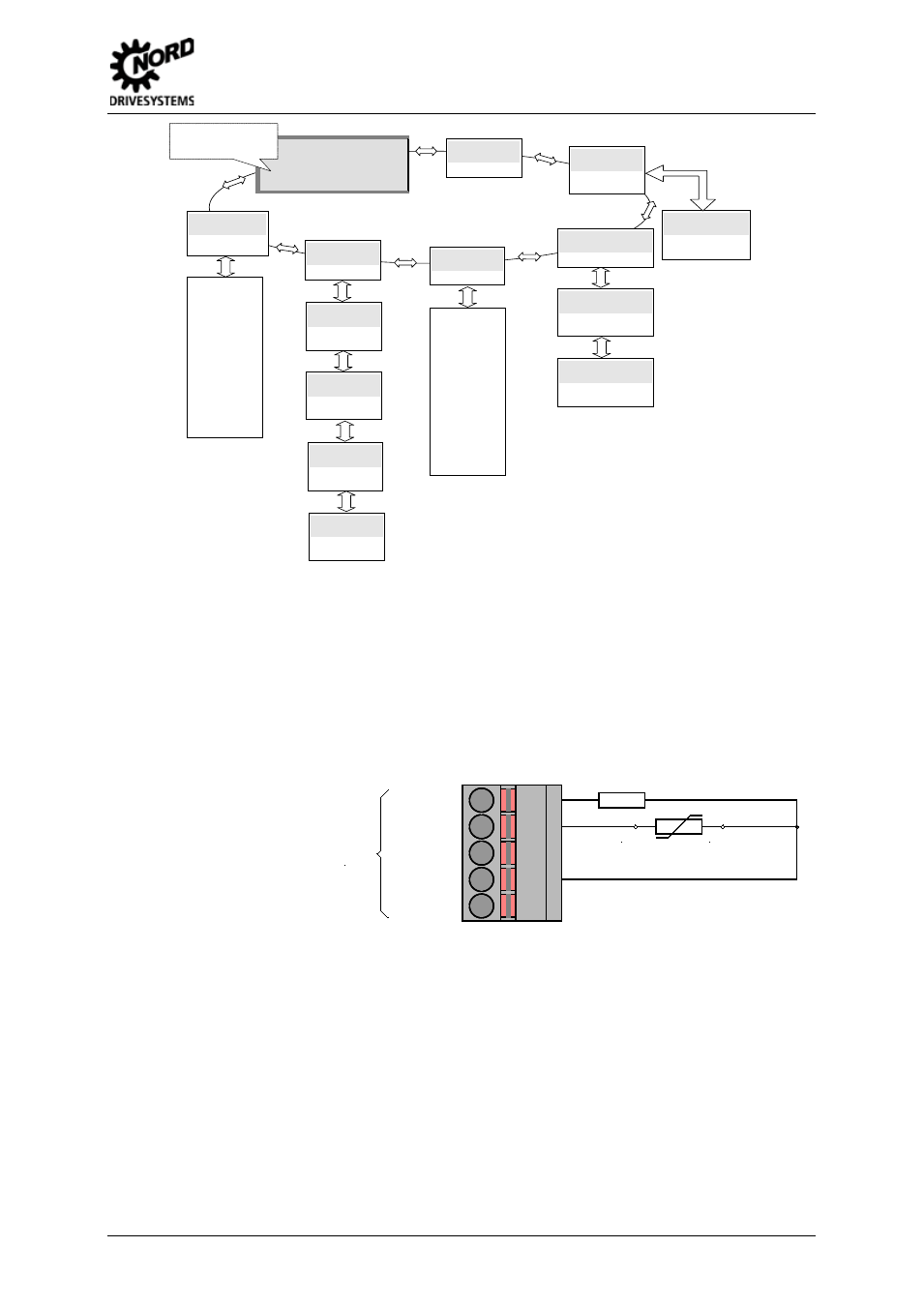
4.3 KTY84-130 connection (above software version 1.7)
The current vector control of the SK 500E series can be further optimised by the use of a KTY84-130
temperature sensor (R
th(0°C)
=500
W, R
th(100°C)
=1000
W). In particular there is the advantage that after an
intermediate mains switch-off during operation the temperature of the motor is measured directly and
therefore the actual value is always available to the frequency inverter. With this, the regulator can
always achieve optimum speed precision.
Connections (Example SK 500E, analog input 2)
Parameter settings (ExampleSK 500E, analog input 2)
The following parameters must be set for the function of the KTY84-130.
R
V
= 2,7 kOhm
AIN 2
GND/0V
VO 10V
11
12
14
16
17
KTY84-130
-1R2
+1R1
X4