8 standardisation of setpoint / target values, Standardisation of setpoint / target values, 8 additional information – NORD Drivesystems BU0505 User Manual
Page 177
8 Additional information
BU 0505 GB-1013
177
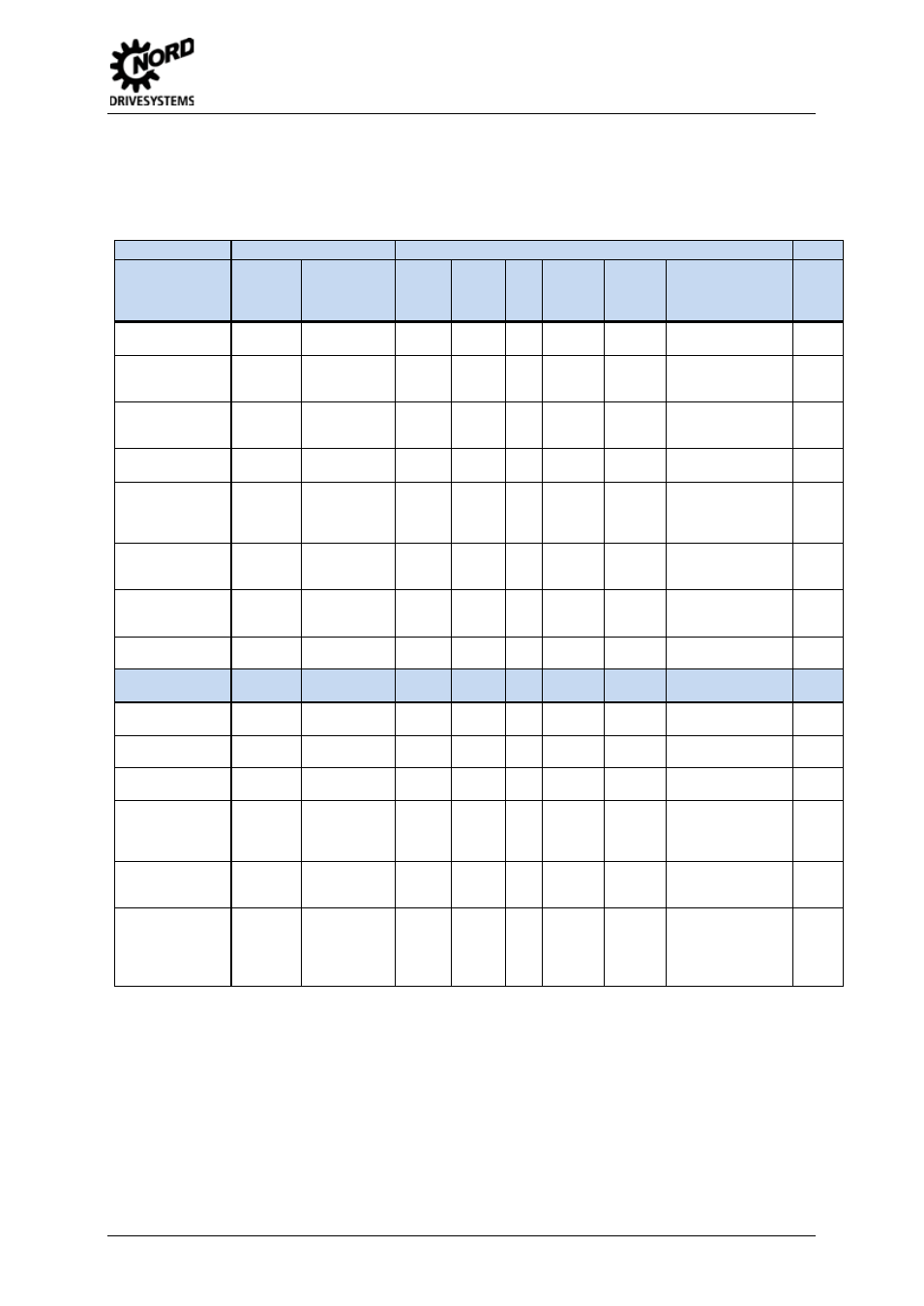
8.8 Standardisation of setpoint / target values
The following table contains details for the standardisation of typical setpoint and actual values. These
details relate to parameters (P400), (P418), (P543), (P546), (P740) or (P741).
Name
Analog signal
Bus signal
Setpoint values
{Function}
Value
range
Standardisatio
n
Value
range
Max.val
ue
Type 100% =
-100% =
Standardisation
Limitati
on
absolut
e
Setpoint frequency
{01}
0-10V
(10V=100%)
P104 … P105
(min - max)
±100%
16384
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f
setpoint
[Hz]/P105
P105
Frequency
addition
{04}
0-10V
(10V=100%)
P410 … P411
(min - max)
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f
setpoint
[Hz]/P411
P105
Frequency
subtraction
{ 05 }
0-10V
(10V=100%)
P410 … P411
(min - max)
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f
setpoint
[Hz]/P411
P105
Max. frequency
{07}
0-10V
(10V=100%)
P411
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f
soll
[Hz]/P411
P105
Actual
valueProcess
controller
{14}
0-10V
(10V=100%)
P105*
U
AIN
(V)/10V
±100%
16384
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f
setpoint
[Hz]/P105
P105
Setpoint process
controller
{ 15 }
0-10V
(10V=100%)
P105*
U
AIN
(V)/10V
±100%
16384
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f
setpoint
[Hz]/P105
P105
Torque current
limit
{2}
0-10V
(10V=100%)
P112*
U
AIN
(V)/10V
0-100%
16384
INT 4000
hex
16384
dez
/
4000
hex
* I[A]/P112
P112
Current limit
{6}
0-10V
(10V=100%)
P536*
U
AIN
(V)/10V
0-100%
16384
INT 4000
hex
16384
dez
/
4000
hex
* I[A]/P536
P536
Actual values
{Function}
Actual frequency
{01}
0-10V
(10V=100%)
P201*
U
AOut
(V)/10V
±100%
16384
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f[Hz]/P201
Actual speed
{02}
0-10V
(10V=100%)
P202*
U
AOut
(V)/10V
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
n[rpm]/P202
Current
{03}
0-10V
(10V=100%)
P203*
U
AOut
(V)/10V
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f[Hz]/P105
Torque current
{04}
0-10V
(10V=100%)
P112* 100/
√((P203)²-
(P209)²)*
U
AOut
(V)/10V
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
I
q
[A]/(P112)*100/
√((P203)²-(P209)²)
Master value
Setpoint frequency
{19} … {24}
0-10V
(10V=100%)
P105*
U
AOut
(V)/10V
±100%
16384
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
*
f[Hz]/P105
Speed from rotary
encoder
{22}
/
/
±200%
32767
INT 4000
hex
16384
dez
C000
hex
-
16385
dez
4000
hex
* n[rpm]/
P201*60/Number
of pairs of poles
or
4000
hex
*n[rpm]/P202
Table 37: Scaling of setpoints and actual values (Selection)
Pos : 458 /Anleit ungen/8. / 9. Zusatzinfor mationen [BU 0500 / BU 0200]/ 8. 9 D efi nition Soll- und Ist wert- Ver arbeit ung (Freq uenz en) @ 0\ mod_1328189429815_388. doc x @ 14489 @ 2 @ 1