Manually tuning – West Control Solutions Pro-EC44 User Manual
Page 109
Pro-EC44 2-Loop Graphical Profile Controller & Recorder
Pro-EC44 Product Manual - 59540-1 October 2013
Page 102
Manually Tuning
Tuning Control Loops - PID with Primary Output only
This technique balances the need to reach setpoint quickly, with the desire to limit setpoint
overshoot at start-up or during process changes. It determines values for the primary
proportional band and the integral and derivative time constants that allow the controller to
give acceptable results in most applications that use a single control device.
CAUTION:
This technique is suitable only for processes that are not
harmed by large fluctuations in the process variable.
1. Check that the scaled input limits and the setpoint limits are set to safe and appropriate
levels for your process. Adjust if required.
2. Set the setpoint to the normal operating value for the process (or to a lower value if an
overshoot beyond this value might cause damage).
3. Select On-Off control (i.e. set the primary proportional band to zero).
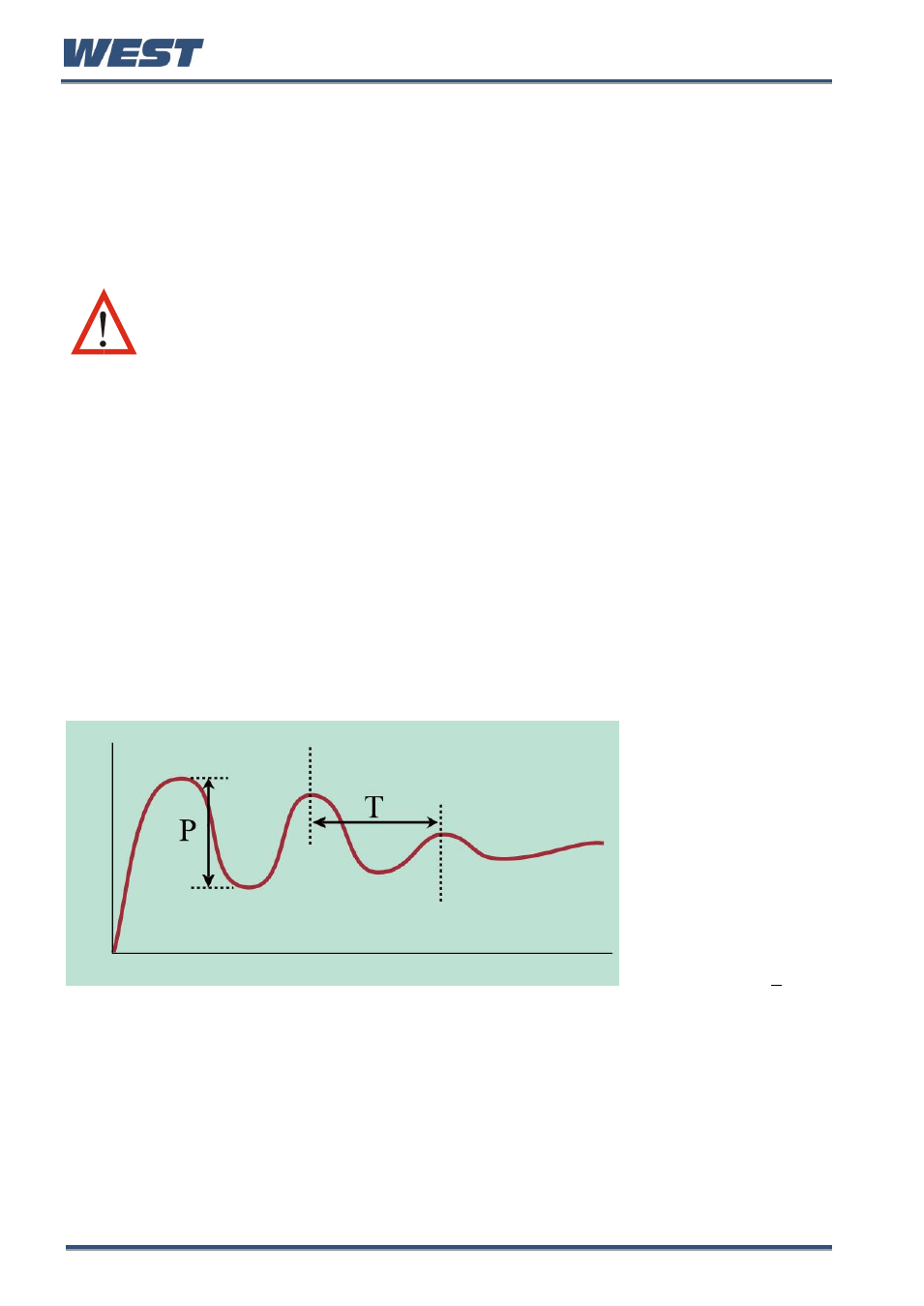
4. Switch on the process. The process variable will rise above and then oscillate about the
setpoint. Record the peak-to-peak variation (P) of the first cycle (i.e. the difference
between the highest value of the first overshoot and the lowest value of the first
undershoot), and the time period of the oscillation (T) in minutes. See the diagram below.
5. Calculate the PID control parameters (primary proportional band, integral time and
derivative time) using the formulas shown.
6. Repeat steps 1-5 for the second control loop if required
P = Peak-to-Peak
variation of first cycle
T = Time period of
oscillation (minutes)
Primary Proportional
Band = P
Integral Time = T
minutes
Derivative Time =
Figure 60.
Manually Tuning - PID with Primary Output
Time
P
ro
c
es
s
V
a
riabl
e