10 (3) electronic gear ratio equation, 4) electronic gear ratio setting examples – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 93
4 Operation
4.2.4 Electronic Gear
4-10
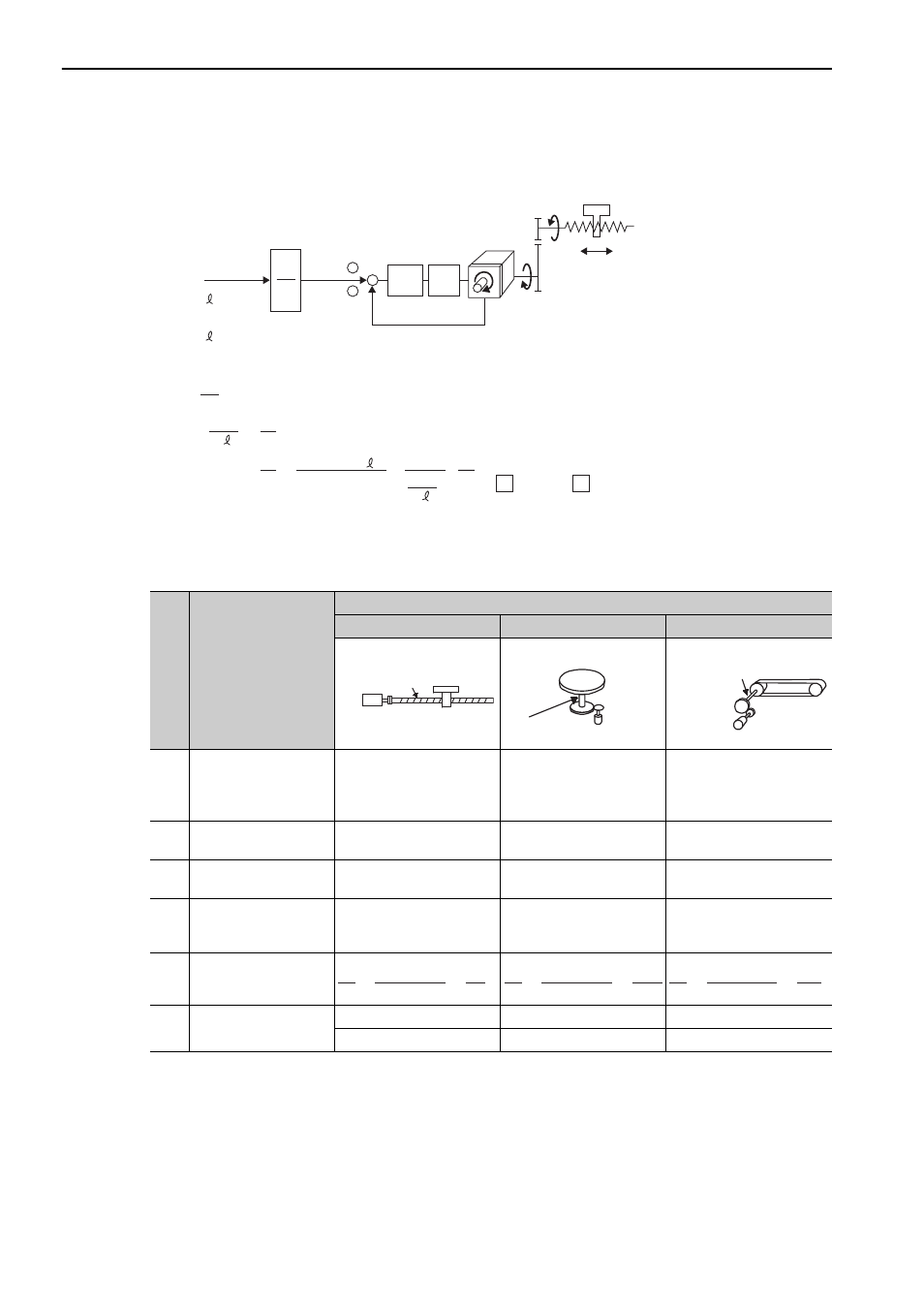
(3) Electronic Gear Ratio Equation
Refer to the following equation to determine the electric gear ratio.
(4) Electronic Gear Ratio Setting Examples
The following examples show electronic gear ratio settings for different load configurations.
A
B
n
m
+
−
Pitch = P (mm/rev)
m
n
Servomotor
P
G
P/rev
P
G
P/revޓ㧦Encoder resolution
Position
loop
Speed
loop
Position reference
Δ
n × P
n × P
B
Δ
A
Δ
P
Δ
Δ
×
×
(
)
m
n
=
P
G
× m
B
A
(
) =
=
P
G
× m ×
P
G
Set A and B with the following parameters.
A
㧦Pn20E
B
㧦Pn210
P mm/rev㧦Ball screw pitch
: Gear ratio (m is the rotation of the motor and n is the rotation of the load shaft.)
mm/P 㧦Reference unit
mm/P
Step
Operation
Load Configuration
Ball Screw
Disc Table
Belt and Pulley
1
Check machine
specifications.
• Ball screw pitch: 6 mm
• Gear ratio: 1/1
• Rotation angle per
revolution: 360
°
• Gear ratio: 1/100
• Pulley diameter: 100 mm
(pulley circumference:
314 mm)
• Gear ratio: 1/50
2
Check the encoder
resolution.
1048576 (20-bit)
1048576 (20-bit)
1048576 (20-bit)
3
Determine the
reference unit used.
Reference unit: 0.001 mm
(1
μm)
Reference unit: 0.01
°
Reference unit: 0.005 mm
(5
μm)
4
Calculate the travel
distance per load shaft
revolution.
6 mm/0.001 mm=6000
360
°/0.01°=36000
314 mm/0.005 mm=62800
5
Calculate the electronic
gear ratio.
6
Set parameters.
Pn20E: 1048576
Pn20E: 104857600
Pn20E: 52428800
Pn210: 6000
Pn210: 36000
Pn210: 62800
Ball screw
pitch: 6 mm
20-bit encoder
Load shaft
Reference unit: 0.001 mm
20-bit encoder
Load shaft
Reference unit: 0.01
°
Gear ratio:
1/100
Load shaft
Gear ratio: 1/50
Reference unit: 0.005 mm
Pulley diameter:
100 mm
20-bit encoder
1048576
6000
1
1
=
B
A
B
A
1048576
36000
100
1
=
B
A
1048576
62800
50
1
=