Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 261
8.3 Parameter Settings for Fully-closed Loop Control
8-19
Fully-closed Loop Control
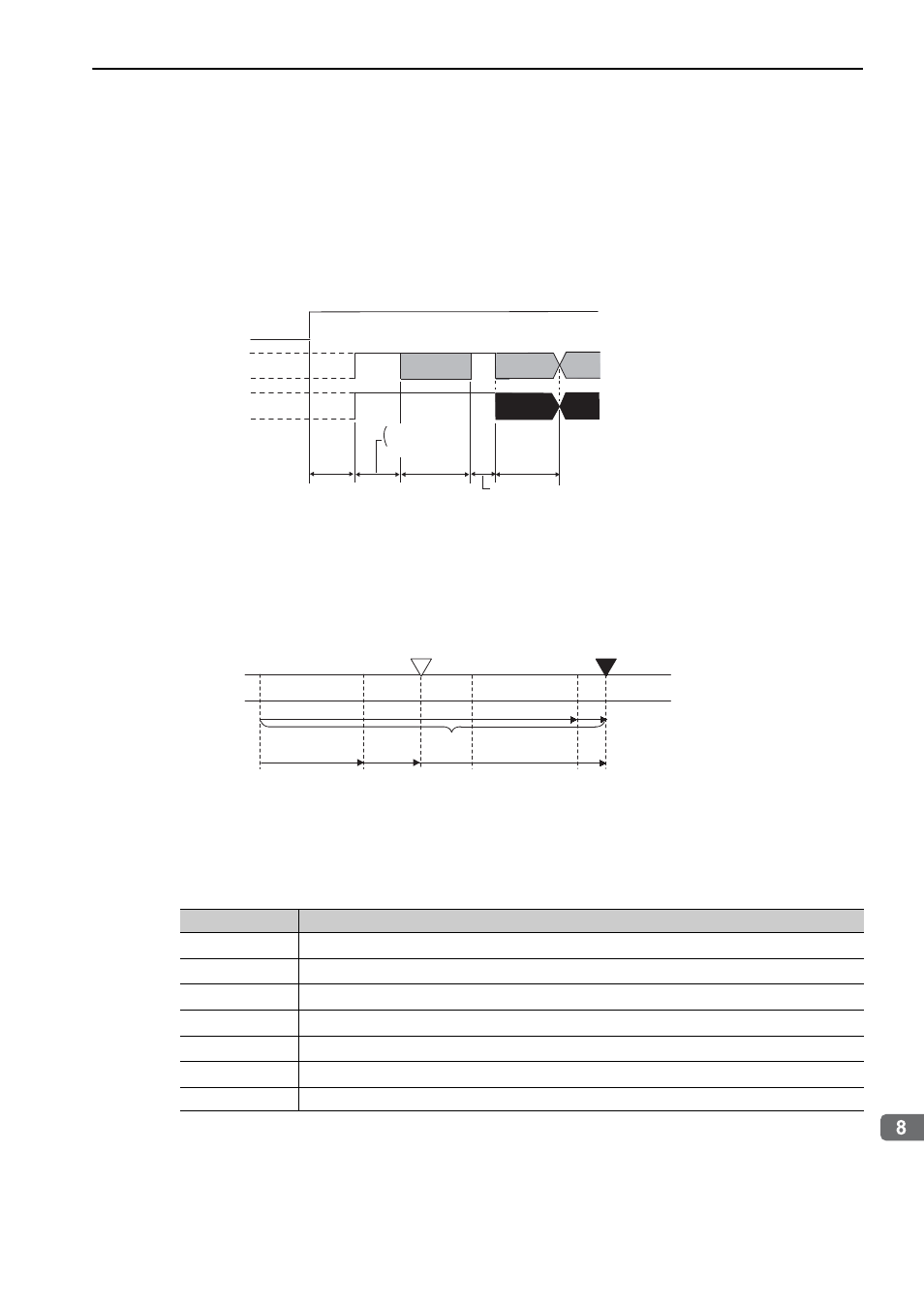
(2) Absolute Data Transmission Sequence and Contents
1. Send the sensor ON command from the host controller.
2. After 100 ms, set the system to serial data reception-waiting-state. Clear the incremental pulse up/down
counter to zero.
3. Receive eight characters of serial data.
4. The system enters a normal incremental operation state about 400 ms after the last serial data is received.
Serial data:
The current position pulses divided by Pn281 are output in serial data.
One serial data is a value equivalent to 1048576 pulses.
Initial incremental pulses:
The current position pulses divided by Pn281 are output in pulses. The number of output pulses is between 0
to 1048576, and the output speed is approximately 1.48 µs per pulse.
Final absolute data P
M
is calculated by following formula.
P
E
=M
O
× R+P
O
P
M
=P
E
–M
S
×R–P
S
Note: If host controller receives the data from the external absolute encoder, do not perform counter reset using the output
of PCO signal.
Sensor ON
command
PAO
PBO
Incremental pulses
Incremental pulses
Undefined
Undefined
(Phase A)
(Phase A)
(Phase B)
(Phase B)
Serial data
400 ms max.
50 ms
1 to 3 ms
About 15 ms
90 ms typ.
60 ms min.
Initial
incremental
pulses
Initial
incremental
pulses
0 1 2 3
3 (Mo)
2
0 1
(M
S
)
P
E
P
M
P
S
M
S
× R
M
o
× R
P
O
Coordinate
value
Values of
Mo and Ms
Reference position (at setup)
Current position
Signal
Meaning
P
E
Current position of external encoder
M
O
Serial data of current position
P
O
Number of initial incremental pulses of current position
M
S
Serial data of reference position
P
S
Number of initial incremental pulses of reference position
P
M
Current value required for the user’s system
R
1048576