Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 252
8 Fully-closed Loop Control
8.1.6 Precautions When Using an External Incremental Encoder by Magnescale
8-10
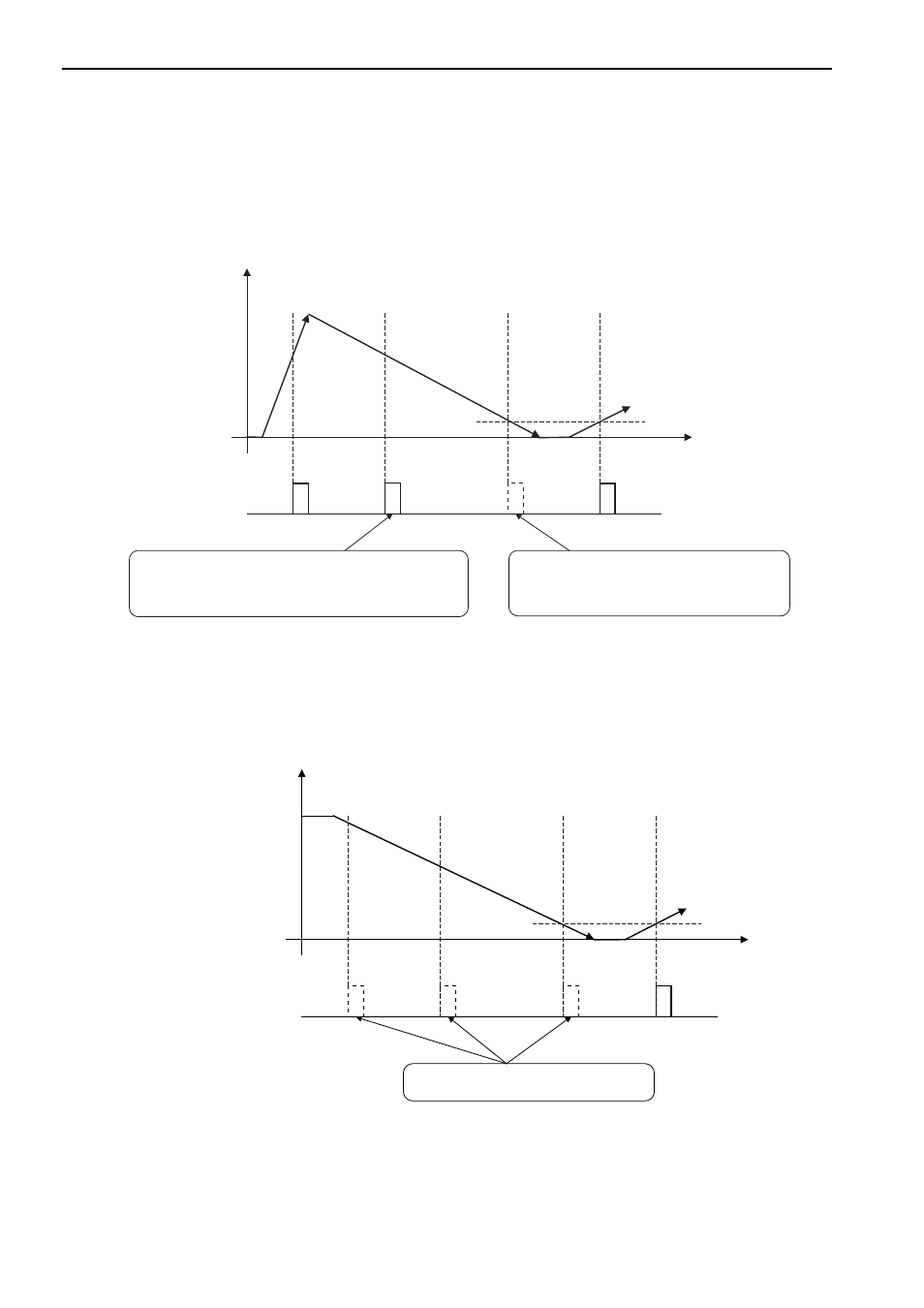
When Using an External Encoder with Multiple Zero Points and Passing 1st
Zero Point in
Forward Direction and Returning after Power ON
When using an external encoder with multiple zero points, the same logic as that explained earlier for an
encoder with only one zero point applies to each zero point.
See When Passing 1st Zero Point in Forward Direction and Returning after Power ON .
When Using an External Encoder with Multiple Zero Points and Passing 1st
Zero Point in
Reverse Direction and Returning after Power ON
When using an external encoder with multiple zero points, the same logic as that explained earlier for an
encoder with only one zero point applies to each zero point.
See When Passing 1st Zero Point in Reverse Direction and Returning after Power ON .
To output the phase-C pulse when a detection point is passed in reverse, set the following parameter to 1.
Even after zero point 1 has first been passed
in the forward direction, the phase-C pulse is not
output here because zero point 2 is passed
in reverse direction.
The phase-C pulse is also output when passing this point
in reverse, because the SERVOPACK has recorded
the position where the phase-C pulse was originally output
when first passing the position in the forward direction.
Scale count-up direction
Power ON
Time
Phase-C pulse output
Zero point 1
Zero point 1
Zero point 2
Zero point 2
Scale count-up direction
Power ON
Time
Phase-C pulse output
Zero point 1
Zero point 3
Zero point 2
Zero point 2
Zero point 2
Phase-C pulse is not output when passing
a zero point in reverse direction.
Zero point 3