4 advanced autotuning by reference (fn202), 1 advanced autotuning by reference, Caution – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 161
5 Adjustments
5.4.1 Advanced Autotuning by Reference
5-24
5.4 Advanced Autotuning by Reference (Fn202)
This section describes the adjustments with advanced autotuning by reference.
5.4.1 Advanced Autotuning by Reference
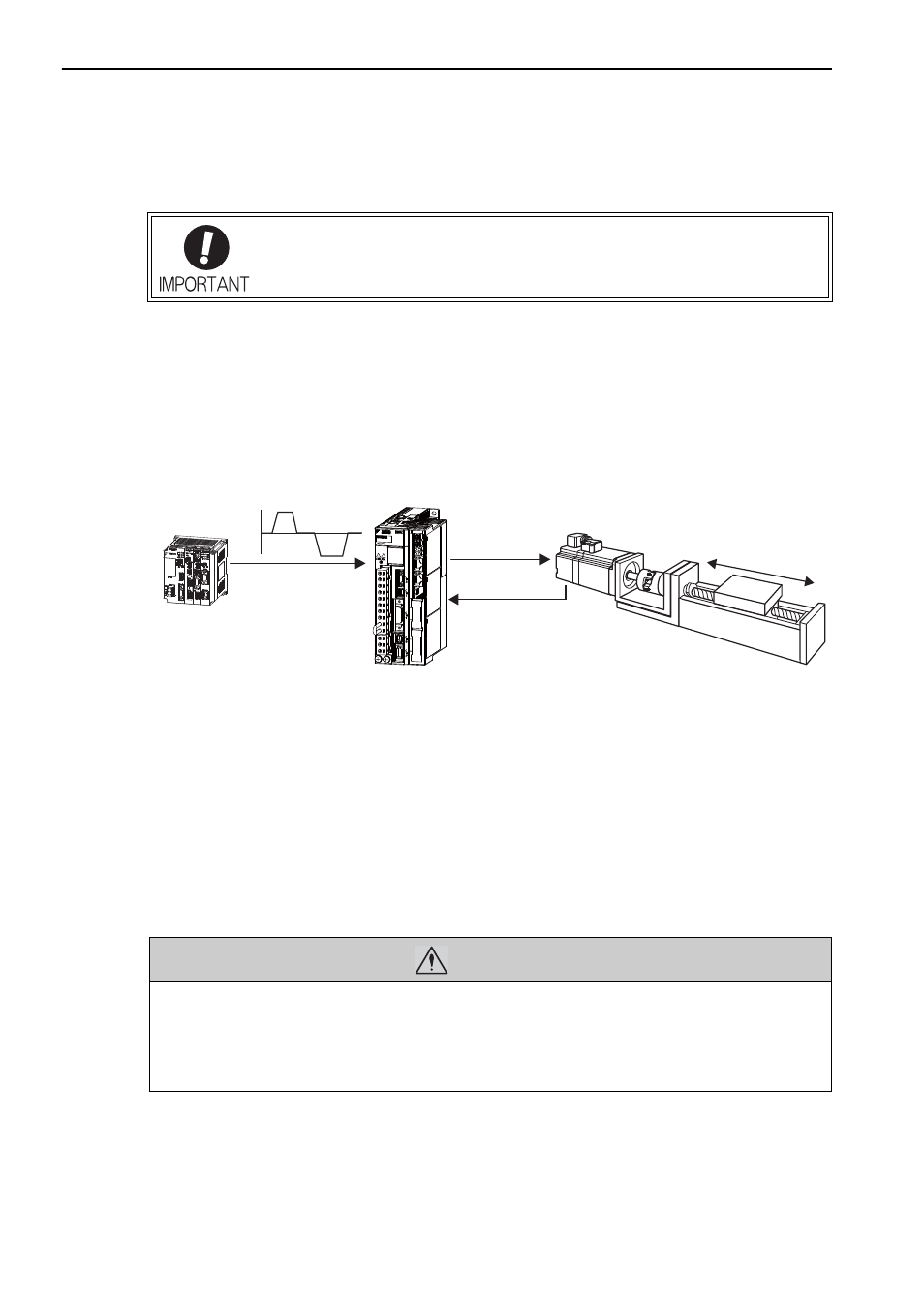
Advanced autotuning by reference is used to automatically achieve optimum tuning of the SERVOPACK in
response to the user reference inputs from the host controller.
Advanced autotuning by reference is performed generally to fine-tune the SERVOPACK after advanced auto-
tuning of the SERVOPACK has been performed.
If the load moment of inertia ratio is set correctly is Pn103, advanced autotuning by reference can be per-
formed without performing advanced autotuning.
Advanced autotuning by reference performs the following adjustments.
• Gains (e.g., position loop gain and speed loop gain)
• Filters (torque reference filter and notch filter)
• Friction compensation
• Anti-resonance control
• Vibration suppression
Refer to 5.4.3 Related Parameters for parameters used for adjustments.
For information on how to input operation references, refer to the manual of the connected command option
module.
• Advanced autotuning by reference starts adjustments based on the set speed loop
gain (Pn100). Therefore, precise adjustments cannot be made if there is vibration
when starting adjustments. In this case, make adjustments after setting a fully stable
gain using one-parameter tuning (Fn203).
CAUTION
• Because advanced autotuning by reference adjusts the SERVOPACK during automatic operation, vibra-
tion or overshooting may occur. To ensure safety, perform advanced autotuning by reference in a state
where the SERVOPACK can come to an emergency stop at any time.
• Be sure to set a suitable value for the moment of inertia ratio (Pn103) using advanced autotuning before
advanced autotuning by reference is performed. If the setting greatly differs from the actual moment of
inertia ratio, normal control of the SERVOPACK may not be possible, and vibration may result.
SERVOPACK
Movement
Speed
Host Controller
Reference
Response
Movement distance
Reference