Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 301
10 Appendix
10.1.2 Parameters
10-4
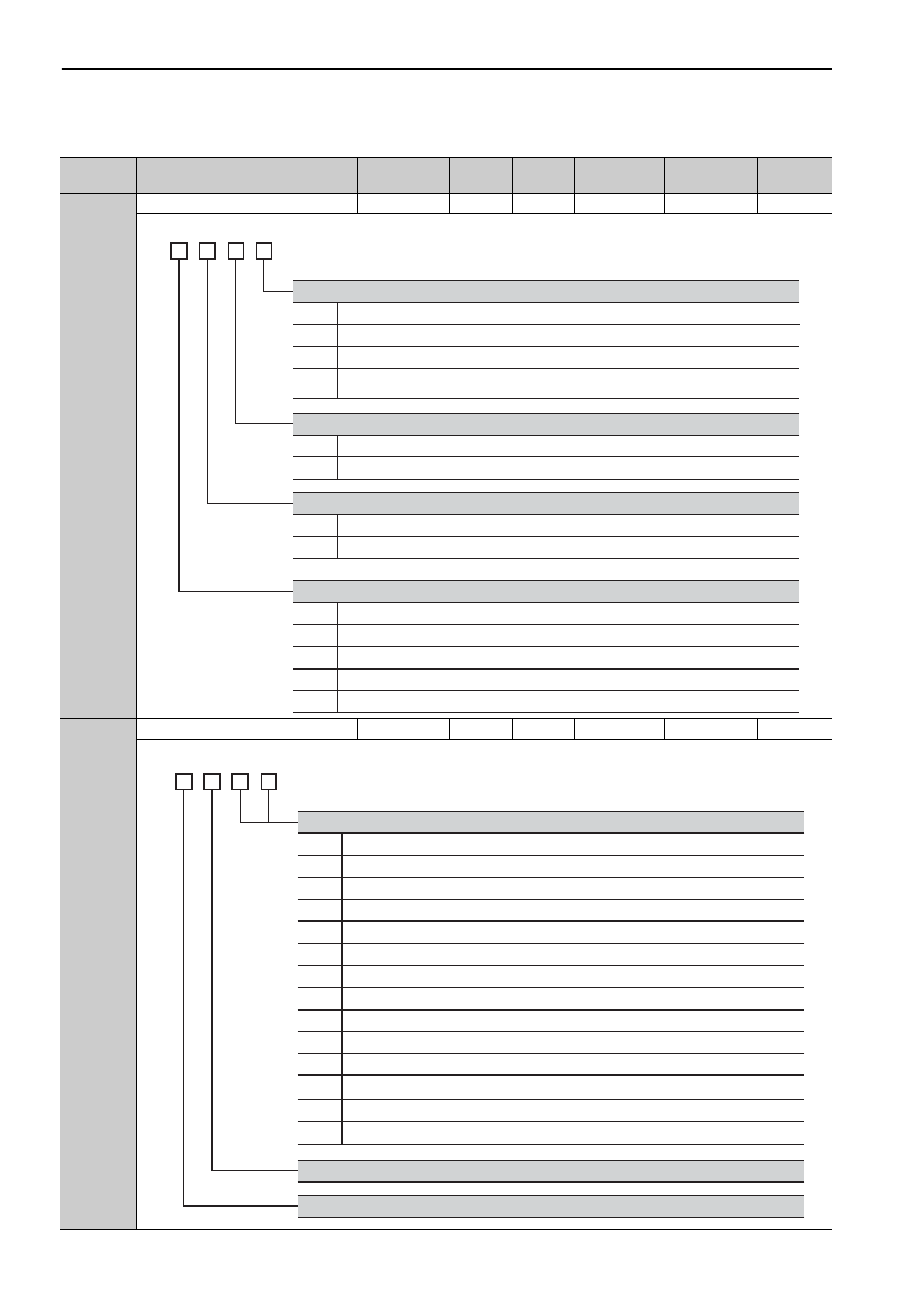
Pn002
Application Function Select Switch 2
0000 to 4113
−
0000
After restart
Setup
−
Pn006
Application Function Select Switch 6
0000 to 005F
−
0002
Immediately
Setup
−
∗1. For details on this function, refer to the manual of the connected command option module.
(cont’d)
Parameter
No.
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification Reference
Section
0
1
2
Disables the torque limit reference from the command option module.
Enables the torque limit reference from the command option module.
Reserved (Do not change.)
Torque Limit Reference Selection for Command Option Module
*1
4th
digit
3rd
digit
2nd
digit
1st
digit
n.
0
1
Disables the speed limit reference when torque limit is used from the command option module.
Enables the speed limit reference when torque limit is used from the command option module.
Speed Limit Reference Selection for Command Option Module
*1
0
1
Uses absolute encoder as an absolute encoder.
Uses absolute encoder as an incremental encoder.
Absolute Encoder Usage
0
1
2
3
4
Do not use external encoder.
Uses external encoder in forward rotation direction.
Reserved (Do not change.)
Uses external encoder in reversed rotation direction.
Reserved (Do not change.)
External Encoder Usage
Enables torque limit reference from the command option module when external input signals
P-CL and N-CL are enabled.
3
(Refer to 4.5)
(Refer to 8.3.1)
00
01
02
03
04
05
06
07
08
09
0A
0B
0C
0D
Motor speed (1 V/1000 min
-1
)
Speed reference (1 V/1000 min
-1
)
Torque reference (1 V/100%)
Position error (0.05 V/1 reference unit)
Position amplifier error (after electronic gears)
(0.05 V/ 1 encoder pulse unit)
Position reference speed (1 V/1000 min
-1
)
Reserved (Do not change.)
Motor-load position error (0.01 V/1 reference unit)
Positioning completion (positioning completed: 5 V, positioning not completed: 0 V)
Speed feedforward (1 V/1000 min
-1
)
Torque feedforward (1 V/100%)
Active gain (1st gain: 1 V, 2nd gain: 2 V)
Completion of position reference (completed: 5 V, not completed: 0 V)
External encoder speed (1 V/1000 min
-1
)
Analog Monitor 1 Signal Selection
4th
digit
3rd
digit
2nd
digit
1st
digit
n.
Reserved (Do not change.)
Reserved (Do not change.)
(Refer to 5.1.3)