5 absolute encoders, Prohibited – Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 115
4 Operation
4-32
4.5 Absolute Encoders
If using an absolute encoder, a system to detect the absolute position can be designed for use with the host
controller. As a result, an operation can be performed without a zero point return operation immediately after
the power is turned ON.
A battery case is required to save position data in the absolute encoder.
The battery is attached to the battery case of the encoder cable.
If an encoder cable with a battery case is not used, install a battery to the host controller.
Note: No battery unit is required, because direct-drive servomotors with the standard specifications have a single-turn
absolute encoder. Detailed settings are not required for the multi-turn limit or for an absolute encoder.
Set Pn002.2 to 0 (factory setting) to use the absolute encoder.
A battery is not required when using the absolute encoder as an incremental encoder.
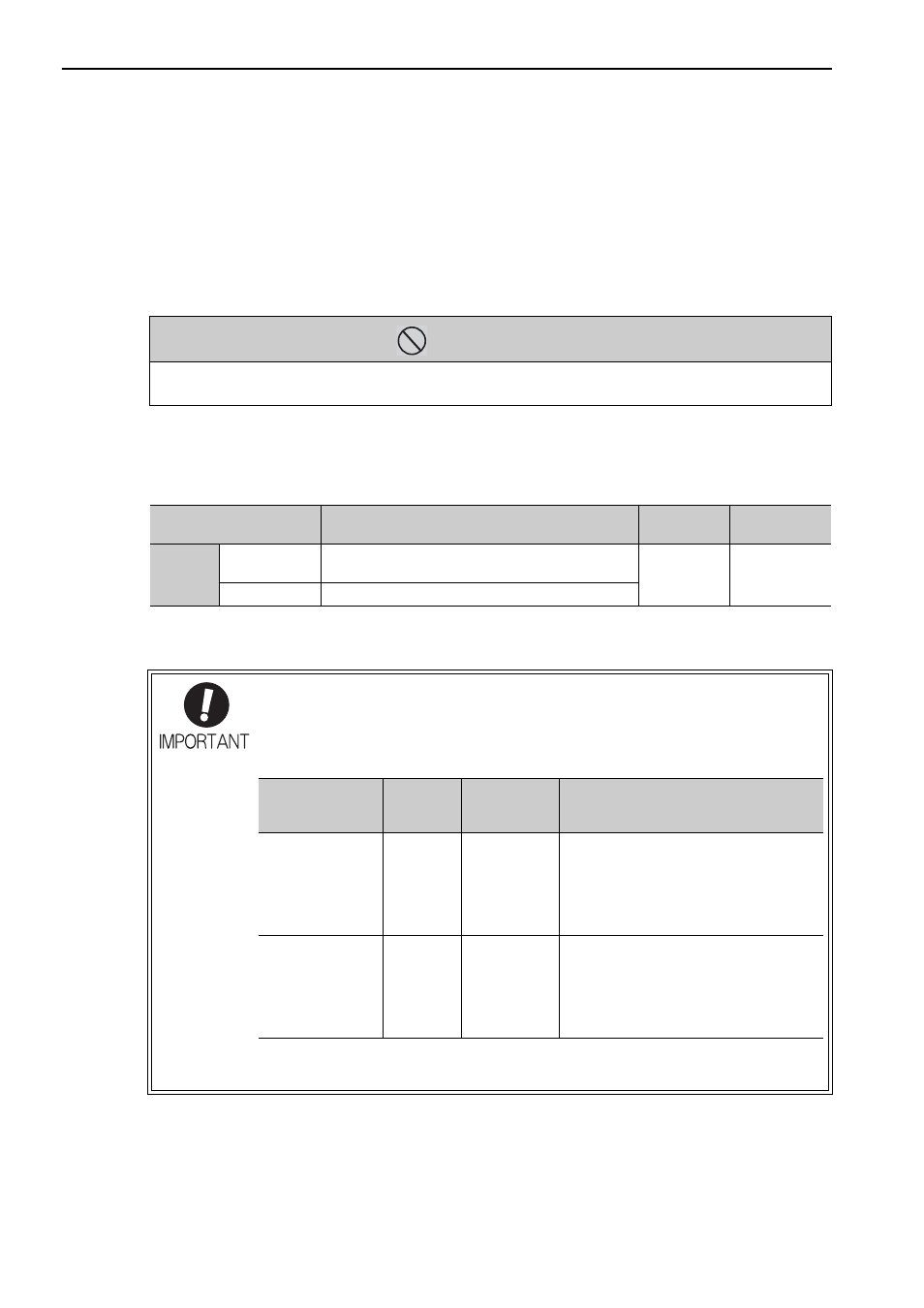
PROHIBITED
• Do not install batteries in both the host controller and battery case. It is dangerous because that sets up a
loop circuit between the batteries.
Parameter
Meaning
When
Enabled
Classification
Pn002
n. 0
[Factory setting] Uses the absolute encoder as an absolute encoder.
After restart
Setup
n. 1
Uses the absolute encoder as an incremental encoder.
The output range of the rotational serial data for the
Σ-V absolute position detecting sys-
tem is different from that of earlier systems for 12-bit and 15-bit encoders. As a result,
the infinite-length positioning system of the
Σ Series must be changed for use with prod-
ucts in the
Σ-V Series. Be sure to make the following system modification.
∗ The action differs when the multiturn limit setting (Pn205) is changed. Refer to 4.5.6 Multiturn
Limit Setting.
Servomotor
Series
Resolution
Output Range
of Rotational
Serial Data
Action when Limit Is Exceeded
Σ Series
SGD
SGDA
SGDB
12-bit
15-bit
-99999 to
+ 99999
• When the upper limit (+99999) is exceeded
in the forward direction, the rotational
serial data will be 0.
• When the lower limit (-99999) is exceeded
in the reverse direction, the rotational serial
data will be 0.
Σ-II, Σ-III, Σ-V
Series
SGDM
SGDH
SGDS
SGDV
17-bit
20-bit
-32768 to
+ 32767
• When the upper limit (+32767) is exceeded
in the forward direction, the rotational
serial data will be -32768.*
• When the lower limit (-32768) is exceeded
in the reverse direction, the rotational serial
data will be +32767.*