Yaskawa Sigma-5 User Manual: Design and Maintenance - Rotary Motors User Manual
Page 155
5 Adjustments
5.3.2 Advanced Autotuning Procedure
5-18
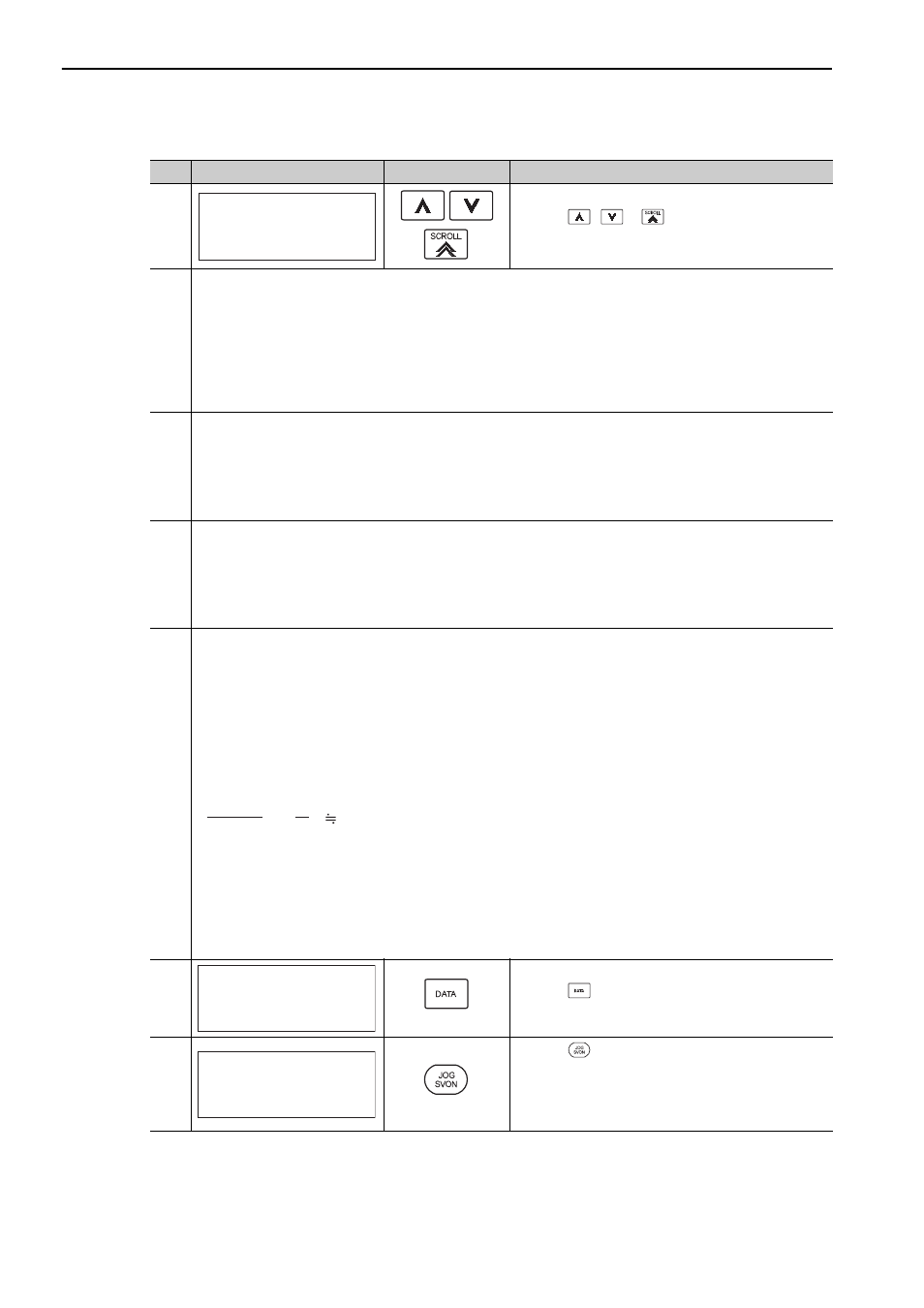
3
Press the
,
or
Key and set the items in
steps 3-1 to 3-4.
3-1
Calculating Moment of Inertia
Select the mode to be used.
Usually, set Jcalc to ON.
Jcalc = ON: Moment of inertia calculated [Factory setting]
Jcalc = OFF: Moment of inertia not calculated
Note:
If the moment of inertia is already known from the machine specifications, set the value in Pn103 and set Jcalc to
OFF.
3-2
Mode Selection
Select the mode.
Mode = 1: Makes adjustments considering responsiveness and stability. (Standard level)
Mode = 2: Makes adjustments for positioning. [Factory setting]
Mode = 3: Makes adjustments for positioning, giving priority to overshooting suppression.
Note: The mode is always set to 1 if a 13-bit encoder is used (applicable servomotor: SGMJV-
A
).
3-3
Type Selection
Select the type according to the machine element to be driven. If there is noise or the gain does not increase, better
results may be obtained by changing rigid type.
Type = 1: For belt drive mechanisms.
Type = 2: For ball screw drive mechanisms [Factory setting].
Type = 3: For rigid systems, such as a gear.
3-4
STROKE (Travel Distance) Setting
Travel distance setting range:
The travel distance setting range is from -99990000 to +99990000. Specify the STROKE (travel distance)
in increments of 1000 reference units. The negative (-) direction is for reverse rotation, and the positive (+)
direction is for forward rotation.
Initial value:
About 3 rotations*
∗ If the servomotor’s encoder resolution is 1048576 (20-bit), the STROKE (travel distance) will be set to
+800000. If the electric gear ratio is set to the factory setting (Pn20E = 4, Pn210 = 1), the initial value is
calculated as shown with the following equation.
Notes:
• Set the number of motor rotations to at least 0.5; otherwise, “Error” will be displayed and the travel distance
cannot be set.
• To calculate the moment of inertia and ensure precise tuning, it is recommended to set the number of motor
rotations to around 3.
• For an SGMCS direct-drive servomotor, the factory setting for the number of motor rotations is 0.3 or equiva-
lent.
4
Press the
Key. The advanced autotuning execution
screen will be displayed.
5
Press the
Key. The servomotor power will be ON
and the display will change from “BB” to “RUN.”
Note:
If the mode is set to 2 or 3, the “Pn102” display will
change to the “Pn141.”
(cont’d)
Step
Display after Operation
Keys
Operation
㧮㧮 㧭㨐㨢㨍㨚㨏㨑㨐ޓ㧭㨀
ޓ㧶㨏㨍㨘㨏㧩㧻㧺
ޓ㧹 㨛 㨐 㨑㧩㧞ޓ㨀㨥㨜㨑㧩㧞
ޓ㧿㨠㨞㨛㨗㨑㧩㧗㧜㧜㧤㧜㧜㧜㧜㧜
ޓޓޓޓޓޓ㧔㧜㧜㧜㧟㧚㧜㧕㨞㨑㨢
×
800000
1048576
4
1
3
rotations
㧮㧮 㧭 d v a n c e d 㧭㨀
㧼㨚㧝㧜㧟㧩㧜㧜㧝㧜㧜
㧼㨚㧝㧜㧜㧩㧜㧜㧠㧜㧜
㧼㨚㧝㧜㧝㧩㧜㧜㧞㧜㧜㧜
㧼㨚㧝㧜㧞㧩㧜㧜㧠㧜㧜
R U N
㧭 d v a n c e d 㧭㨀
㧼㨚㧝㧜㧟㧩㧜㧜㧝㧜㧜
㧼㨚㧝㧜㧜㧩㧜㧜㧠㧜㧜
㧼㨚㧝㧜㧝㧩㧜㧜㧞㧜㧜㧜
㧼㨚㧝 㧠 㧝㧩㧜㧜㧡㧜㧜