Yaskawa SGDH Linear Sigma Series User Manual
Page 393
12.3 Connection to Host Controller
12-17
12
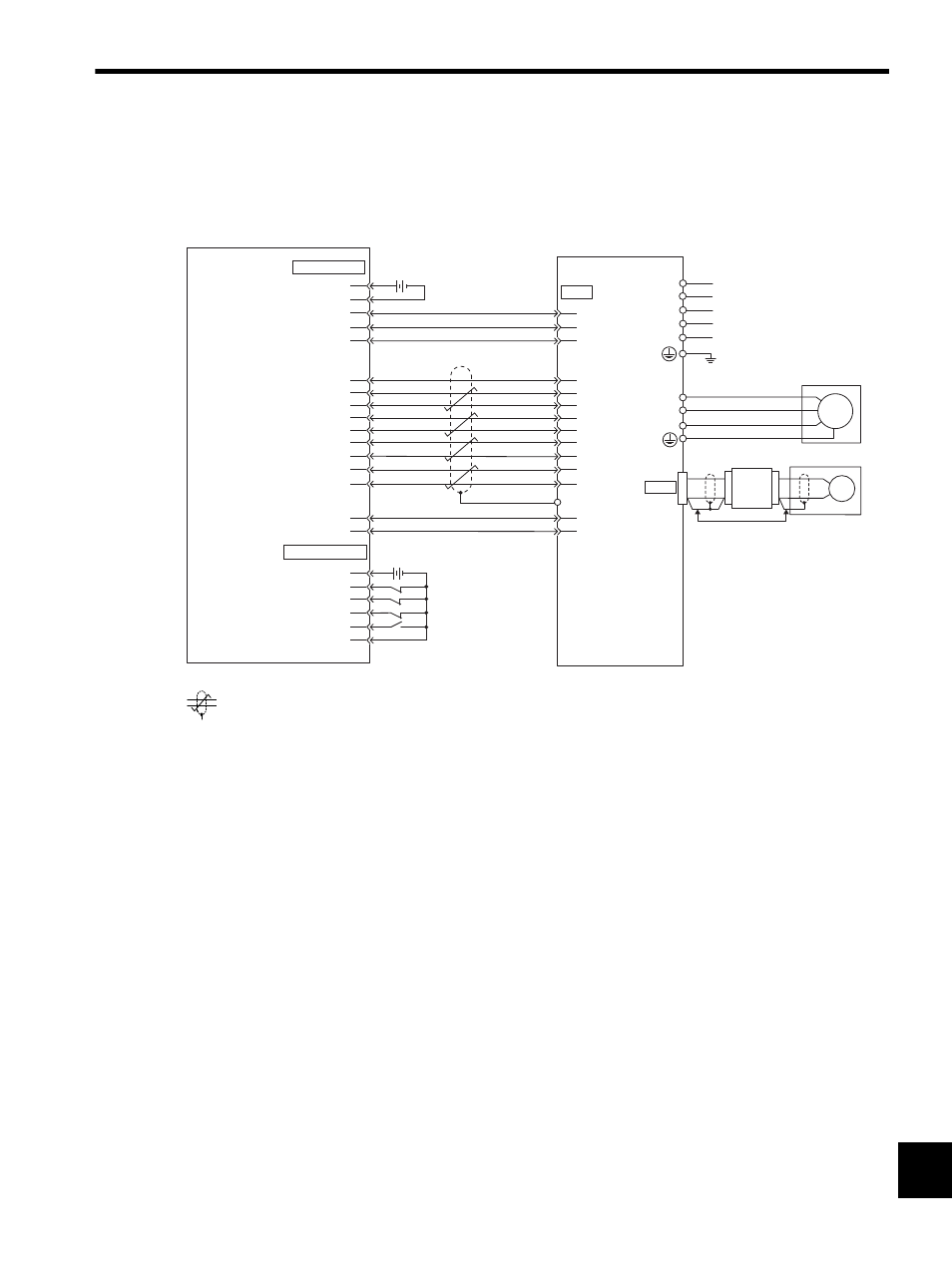
12.3.2 Example of Connection to OMRON’s Motion Control Unit
*
represents twisted-pair wires.
Note: 1. Only signals applicable to OMRON’s MC unit and Yaskawa’s SGDH SERVOPACK are shown
in the diagram.
2. The main circuit power supply is a three-phase 200 VAC SERVOPACK input in the example.
The power supply and wiring must be in accordance with the power supply specifications of the
SERVOPACK to be used.
3. Note that incorrect signal connection will cause damage to the MC unit and SERVOPACK.
4. Open the signal lines not to be used.
5. The above connection diagram shows only X-axis connection. When using another axes, make
connection to the SERVOPACK in the same way.
6. The normally closed (N.C.) input terminals not to be used at the motion control unit I/O connec-
tor section must be short-circuited at the connector.
7. Make the setting so that the servo can be turned ON/OFF by the /S-ON signal.
CN1
3
4
5
16
13
12
11
19
15
14
18
1
5
6
1
19
20
L1C
L3
L2
L1
L2C
35
34
20
36
47
32
MC unit manufactured
by OMRON
DRV connector
SGDH SERVOPACK
(CV500-MC221 / MC421)
(CS1W-MC221 / MC421)
C200H-MC221
10
10
17
2
4
6
14
1
2
31
33
44
40
ALM+
/S-ON
/ALM-RST
SG
SG
ALM-
FG
PAO
/PAO
/PBO
PBO
PCO
/PCO
V-REF
+24V-IN
24V input
24VDC
24VDC
24V input ground
X-axis alarm input
X-axis alarm reset output
X-axis run reference output
X-axis feedback ground
X-axis phase-A input
X-axis phase-/A input
X-axis phase-B input
X-axis phase-/B input
X-axis phase-Z input
X-axis phase-/Z input
X-axis speed reference
Axis speed reference ground
24V output
24V output ground
I/O connector
24V input
X-axis CW limit input
X-axis CCW limit input
X-axis immediate stop input
X-axis origin proximity input
24V input ground
Shell
∗
Control power supply
Main circuit power supply
CN2
W
V
U
Linear servomotor
Linear scale
Properly treat the ends of shielded wired.
M
PG
Serial
converter
unit