13) jog operation from the panel operator – Yaskawa SGDH Linear Sigma Series User Manual
Page 265
9.2 Trial Operation Using SERVOPACK Internal References
9-21
9
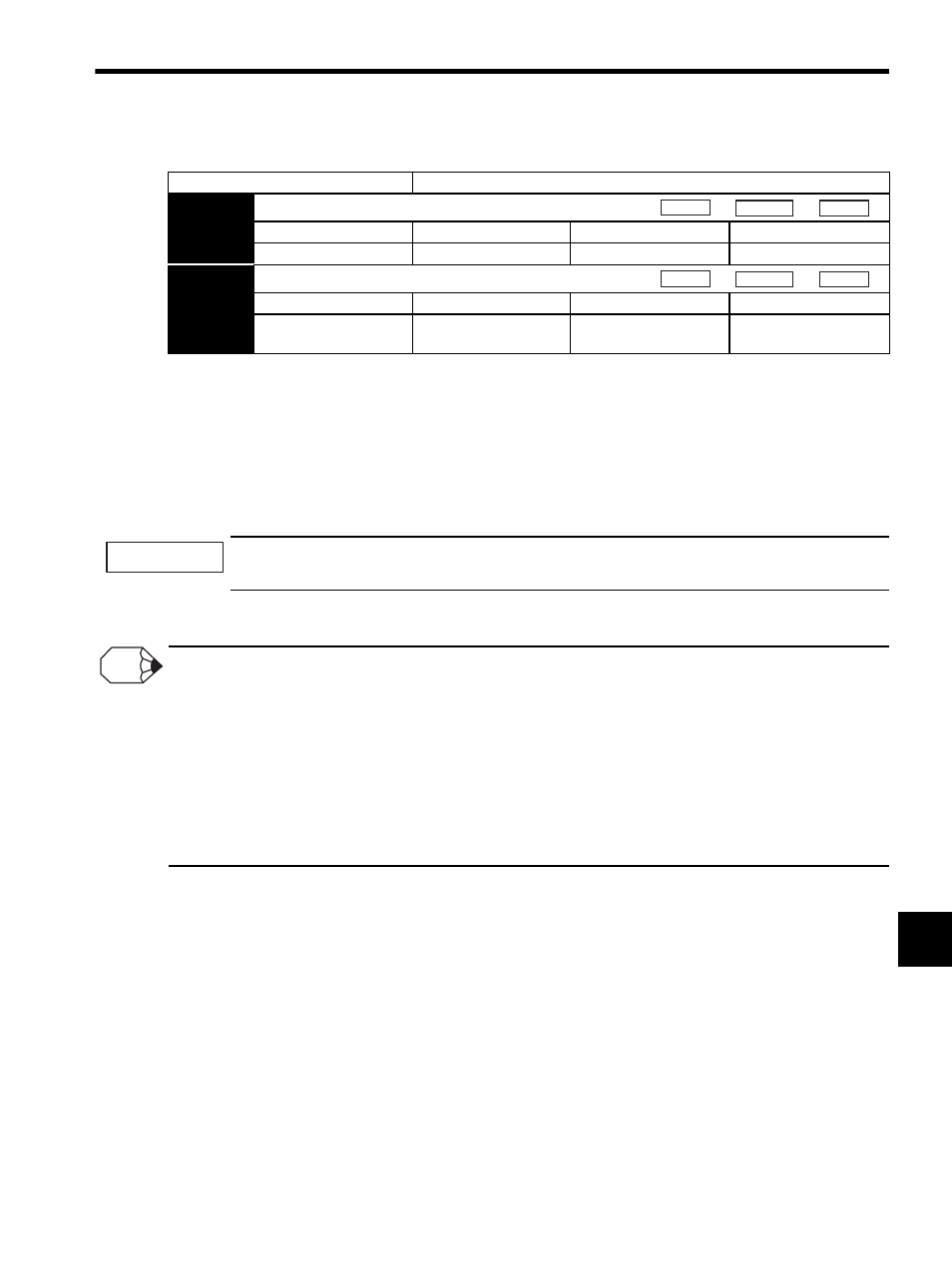
(e) Related Parameters
(13) Jog Operation from the Panel Operator
After checking steps (1) to (12), perform a trial operation as follows:
Note: Perform trial operations without a load attached, if possible.
1. Turn ON the control power and main circuit power.
2. Operate the panel operator or digital operator and move the linear servomotor using jog operation. For
details on jog operation, refer to 8.2.3 JOG Mode Operation (Fn002).
When turning ON the servo for the first time after installation and wiring, stand away from the linear servo-
motor as overrun may occur.
3. Check that the linear servomotor is moving normally from end to end of the stroke.
Unsuccessful Trial Operations
An unsuccessful trial operation could be attributed to the following conditions. Check the conditions and take appropriate
measures.
• The force reference is saturated because the load is too heavy, or the jog speed is too fast.
Lower the jog speed or lighten the load.
• The linear servomotor is moving slightly and then stops.
The linear servomotor and linear scale are out of alignment. Check the wiring, scale pitch setting, linear scale count,
and whether the motor forward direction matches the scale count direction.
• Polarity detection is not being performed normally.
Perform step (12) Checking or Adjusting Polarity Detection.
Setup is finished when all these checks have been completed.
Parameters
Description
Pn481
Polarity Detection Speed Loop Gain
Setting Range
Setting Unit
Factory Setting
Setting Validation
1 to 2000
1 Hz
40 Hz
Immediately
Pn482
Polarity Detection Speed Loop Time Constant
Setting Range
Setting Unit
Factory Setting
Setting Validation
15 to 51200
(0.15 to 512.00 ms)
0.01 ms
3000
(30.00 ms)
Immediately
Speed
Position
Force
Speed
Position
Force
IMPORTANT
INFO