1 autotuning, 1 servo gain adjustment methods, 1 autotuning -2 – Yaskawa SGDH Linear Sigma Series User Manual
Page 324: 1 servo gain adjustment methods -2, 1 autotuning . if, Refer to 10.1 autotuning
10 Adjustments
10.1.1 Servo Gain Adjustment Methods
10-2
10.1 Autotuning
10.1.1 Servo Gain Adjustment Methods
The SERVOPACK has the servo gains to determine the servo response characteristics. The servo gains are set in
the parameters. The parameters are designated for each function as shown in 10.1.2 List of Servo Adjustment
Functions.
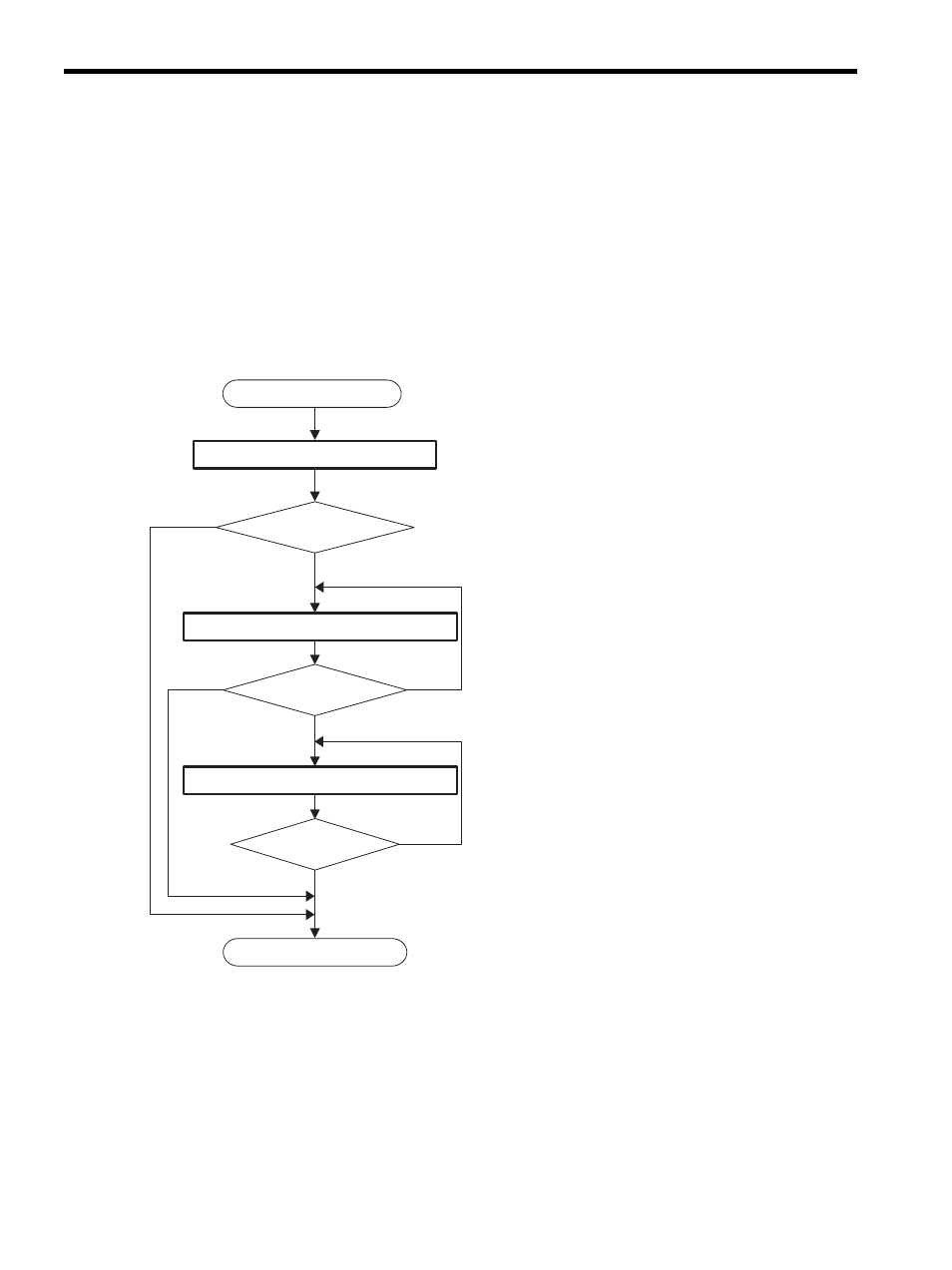
The servo gains are factory-set to stable values, and responsiveness can be increased depending on the actual
machine conditions. The following flowchart shows an overview procedure for adjusting the servo gains to
reduce the positioning time for position control. Follow this flowchart to effectively adjust the servo gains. For
functions in bold lines in the flowchart, select the adjustment method according to the client’s intent using 10.1.2
List of Servo Adjustment Functions.
If the desired responsiveness cannot be achieved adjusting according to the servo gain adjustment methods,
consider the following possible causes.
• Autotuning does not suit the operating conditions.
Adjust the servo gains manually. Refer to 10.3 Manual Tuning.
• The selection of settings for the positioning time reduction functions or vibration reduction functions are
not appropriate.
Each function may not be effective for all machines due to machine characteristics or operating condi-
tions.
Use other positioning time reduction function or vibration reduction function.
Start adjusting servo gain.
Adjust using (1) Autotuning Functions.
Results OK?
Adjust using (2) Positioning Time Reduction Functions.
Results OK?
Results insufficient.
Adjust using (3) Vibration Reduction Functions.
Results insufficient.
Results insufficient.
Vibration resulted
Results OK?
End servo gain adjustment.
Results OK.
Results OK.
Results OK.