2 robot flange dimensions, 3 specifications – Adept s650 Viper User Manual
Page 87
Chapter 7: Technical Specifications
Adept Viper s650/s850 Robot with MB-60R/eMB-60R User’s Guide, Rev F
Page 87 of 100
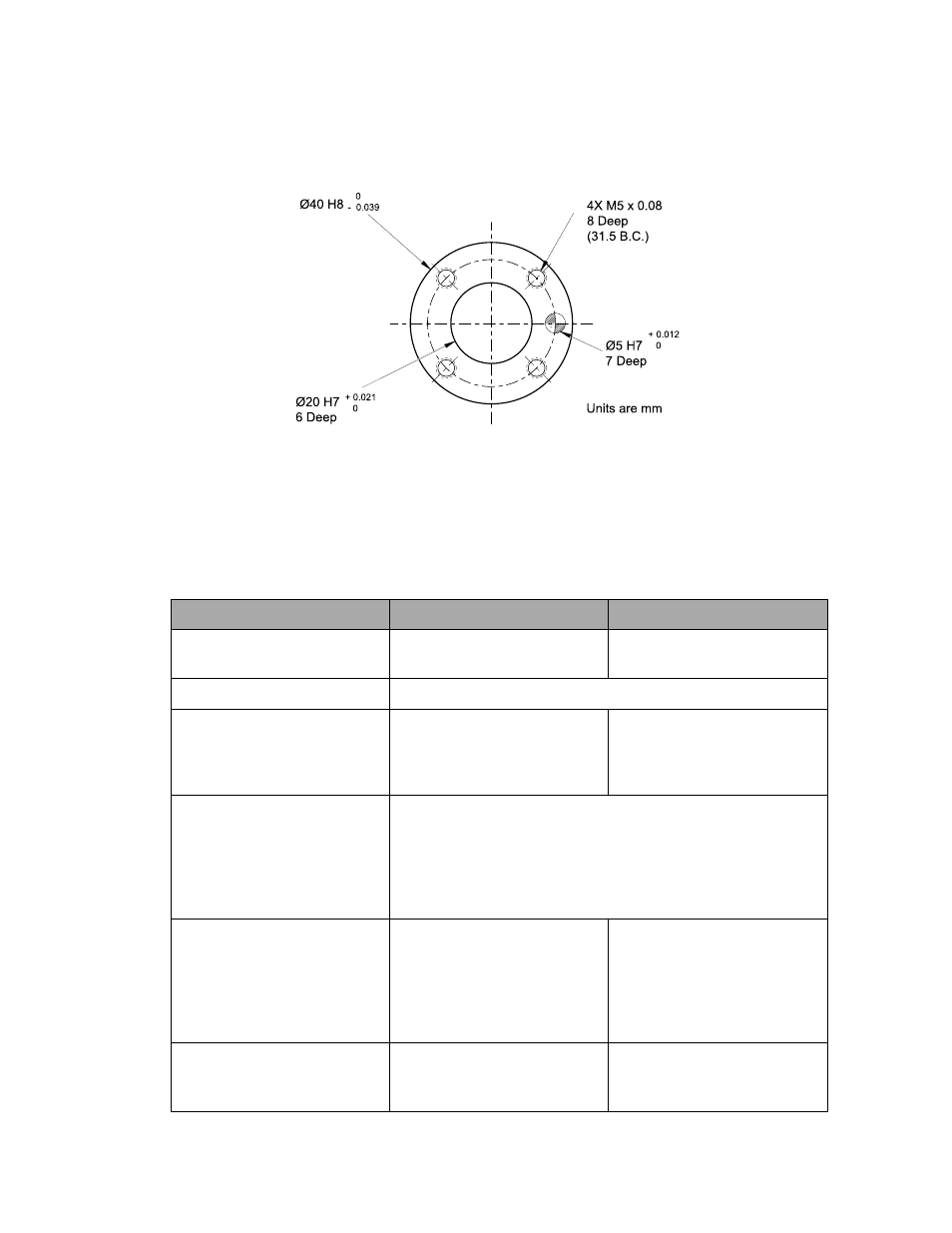
7.2 Robot Flange Dimensions
Figure 7-5. Robot Flange Dimensions
7.3 Specifications
Table 7-1. Robot Specifications
Specification
s650
s850
Overall arm length
270 (first link) + 295 (second
link) = 565 mm
365 (first link) + 405 (second
link) = 770 mm
Arm offset
J1 (swing): 75 mm, J3 (front link): 90 mm
Maximum motion area
R = 733 mm (end-effector
mounting face)
R = 653 mm (Point P: J4, J5,
J6 center)
R = 934 mm (end-effector
mounting face)
R = 854 mm (Point P: J4, J5,
J6 center)
Motion range
J1: ±170°
J2: -190°, +45°
J3: -29°, +256°
J4: ±190°
J5: ±120°
J6: ±360°
Maximum joint speed
J1: 328°/sec
J2: 300°/sec
J3: 375°/sec
J4: 375°/sec
J5: 375°/sec
J6: 600°/sec
J1: 250°/sec
J2: 250°/sec
J3: 250°/sec
J4: 375°/sec
J5: 375°/sec
J6: 600°/sec
Maximum composite speed
(at the center of an end-effec-
tor mounting face)
8200 mm/s
7600 mm/s