External mounting locations on robot, 8 designing end-effectors, Continuous turn on j6 – Adept s650 Viper User Manual
Page 29: Mass of end-effector
Chapter 2: Robot Installation
Adept Viper s650/s850 Robot with MB-60R/eMB-60R User’s Guide, Rev F
Page 29 of 100
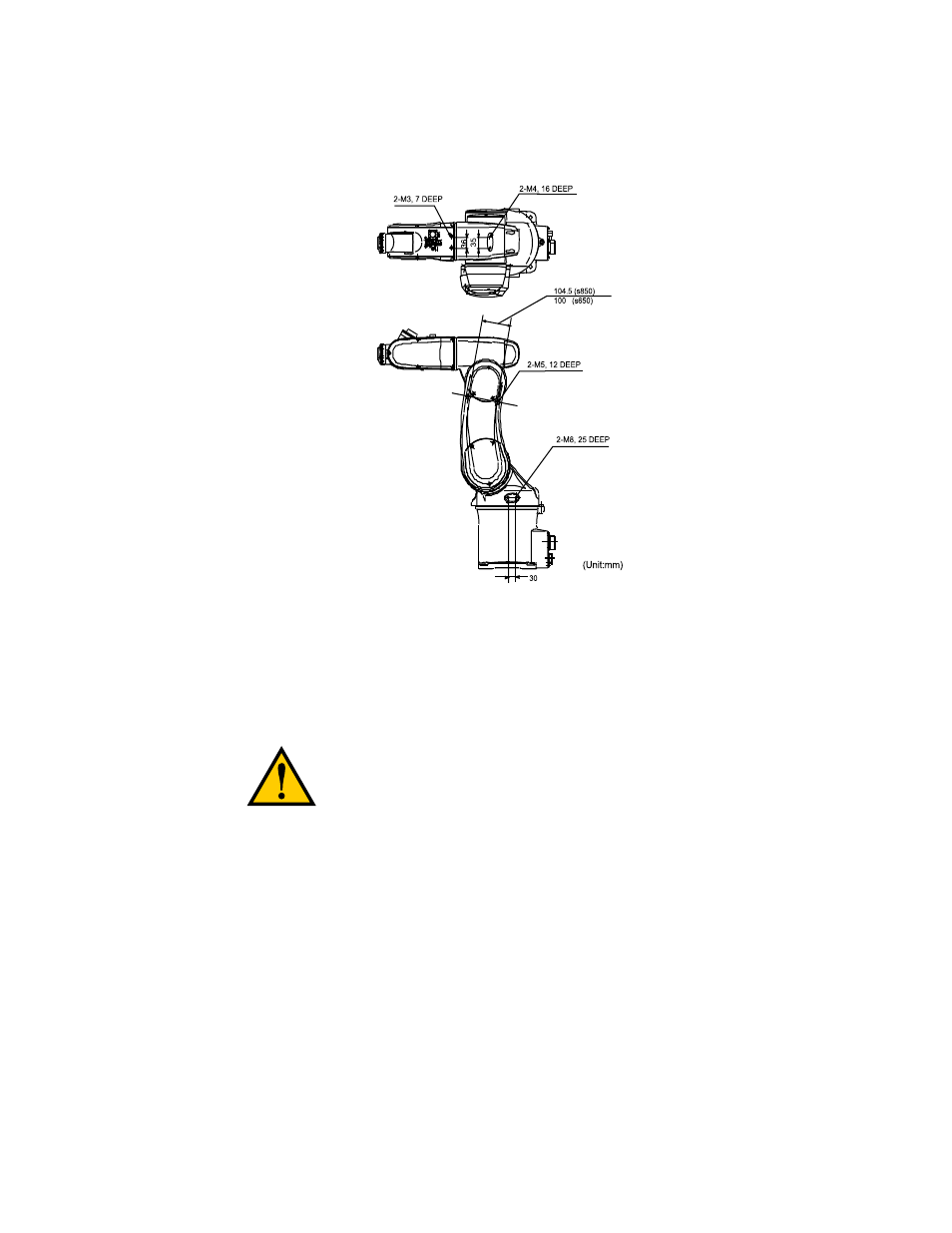
External Mounting Locations on Robot
Figure 2-8. External Mounting Holes on Robot
2.8 Designing End-Effectors
Design an end-effector such that it is in compliance with items described in this section.
CAUTION: If the end-effector design precautions are not
observed, the clamped parts of the robot may become
loose, rattle, or be out of position. The mechanical parts
of the robot and robot controller may become damaged.
Continuous Turn on J6
As an option, the Adept Viper s650/s850 can be ordered so that Joint 6 (J6) is programmed for
continuous turn. Note that if J6 is programmed for continuous turn, it may lose its calibration.
However, the other robot joints (J1 - J5) will not be affected.
Mass of End-Effector
Design the end-effector so that the total mass of the end-effector (including workpiece) will be
lighter than the maximum payload capacity of the robot (5 kg). The total mass includes the wir-
ing, tubing, etc.