Xio output signals – Adept s650 Viper User Manual
Page 44
Chapter 3: MotionBlox-60R
Adept Viper s650/s850 Robot with MB-60R/eMB-60R User’s Guide, Rev F
Page 44 of 100
XIO Output Signals
The eight digital outputs share a common, high-side (sourcing) Driver IC. The driver is
designed to supply any kind of load with one side connected to ground. It is designed for a
range of user-provided voltages from 10 to 24 VDC and each channel is capable of up to 0.7 A
of current. This driver has overtemperature protection, current limiting, and shorted load pro-
tection. In the event of an output short or other overcurrent situation, the affected output of the
Driver IC turns off and back on automatically to reduce the temperature of the IC. The Driver
draws power from the primary 24 VDC input to the robot through a self-resetting polyfuse.
The outputs are accessed through direct connection to the XIO connector (see Table 3-7), or
through the optional XIO Termination Block. See the documentation supplied with the Ter-
mination Block for details.
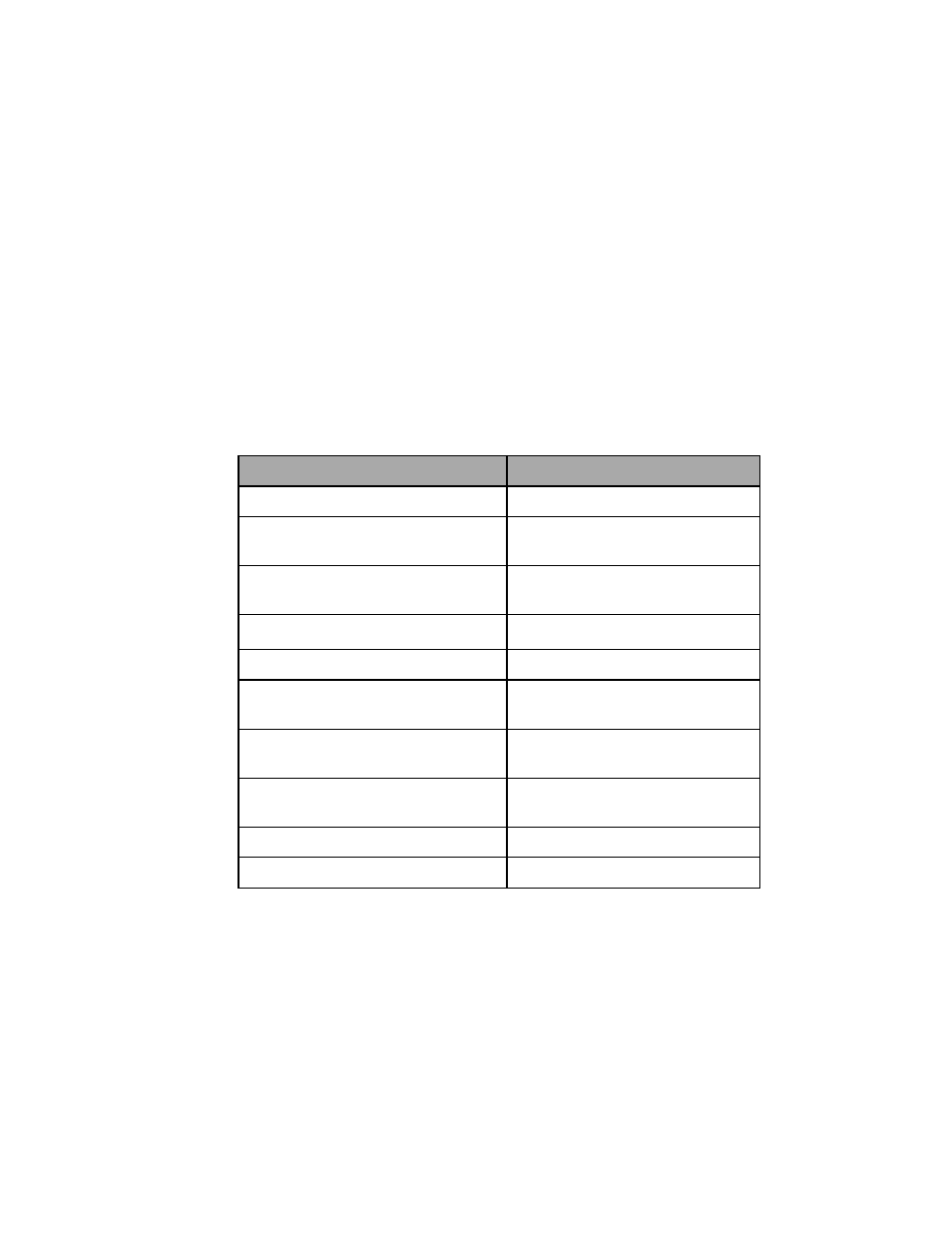
XIO Output Specifications
Table 3-9. XIO Output Circuit Specifications
Parameter
Value
Power supply voltage range
See System Operation
Operational current range,
per channel
I
out
≤
700 mA
Total Current Limitation, all channels
on.
I
total
≤
1.0 A @ 50° C ambient
I
total
≤
1.5 A @ 25° C ambient
On-state resistance (I
out
= 0.5 A)
R
on
≤
0.32
Ω
@ 85
°
C
Output leakage current
I
out
≤
25 µA
Turn-on response time
125 µsec max., 80 µsec typical
(hardware only)
Turn-off response time
60 µsec. max., 28 µsec typical
(hardware only)
Output voltage at inductive load
turnoff (I
out
= 0.5 A, Load = 1 mH)
(+V - 65)
≤
V
demag
≤
(+V - 45)
DC short circuit current limit
0.7 A
≤
I
LIM
≤
2.5 A
Peak short circuit current
I
ovpk
≤
4 A