Mounting the robot – Adept s650 Viper User Manual
Page 22
Chapter 2: Robot Installation
Adept Viper s650/s850 Robot with MB-60R/eMB-60R User’s Guide, Rev F
Page 22 of 100
Mounting the Robot
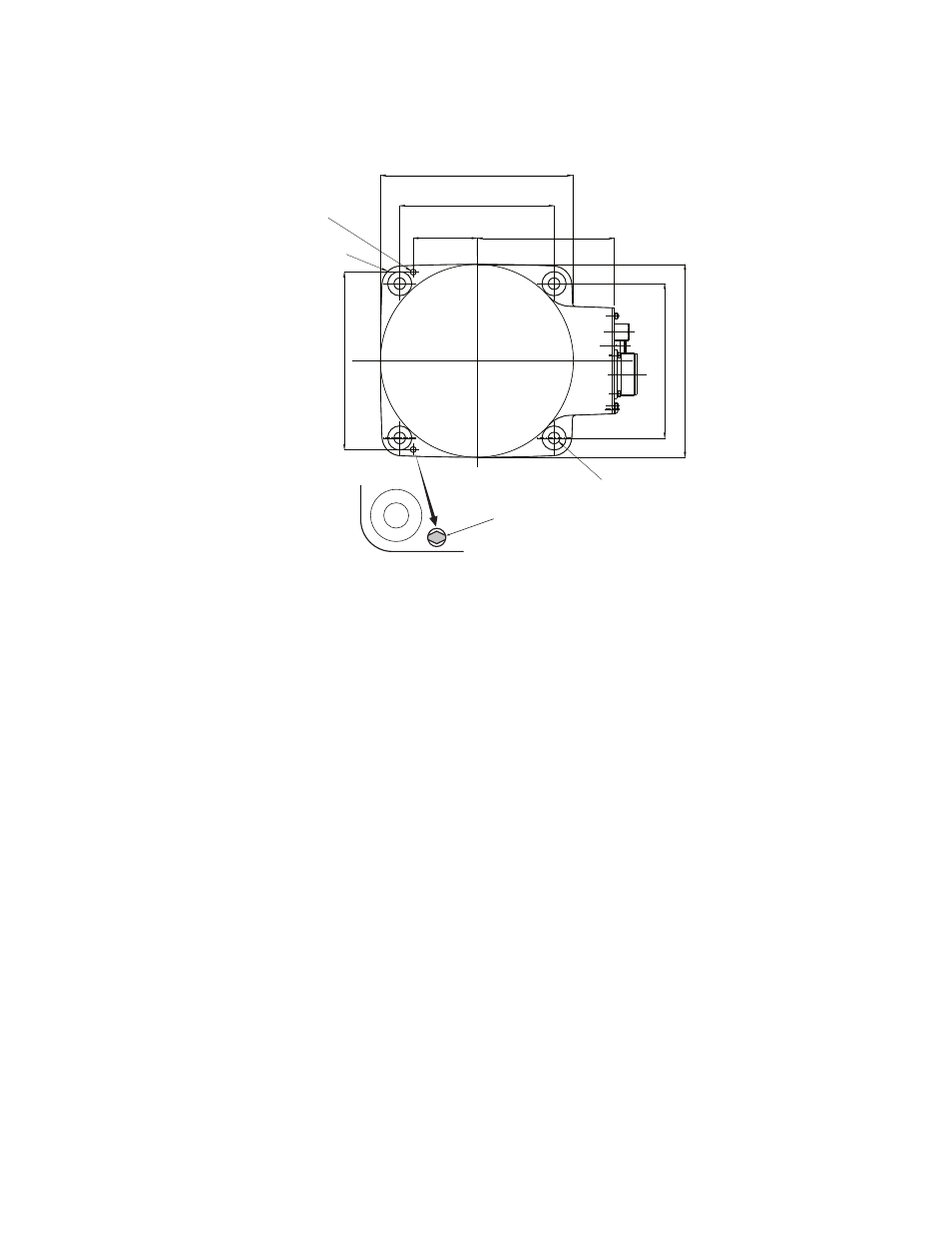
2X Ø6
200
160
R20
66 ±0.05
142.3
4X Ø12 THRU
For M10
184 ±0.05
160
200
+0.012
- 0
Diamond-shaped pin
Units are mm
Figure 2-3. Mounting Hole Pattern for Robot
1. See the preceding figure for the dimensions of the mounting holes in the robot mounting
position where the robot is to be secured.
l
Drill four bolt holes (M10), 20 mm deep or more.
l
Drill a dowel pin hole Ø6, H7 for the diamond shaped pin, 10 mm deep or more.
l
Drill a dowel pin hole Ø6, H7 for the internally threaded positioning pin, 10 mm
deep or more.
2. Locate two alignment pins, one round and one diamond-shaped, supplied in the acces-
sory kit.
3. Drive the diamond-shaped pin into one Ø6, H7 hole so that it is oriented as shown in
the preceding figure.
4. Drive the internally threaded alignment pin into the other Ø6, H7 hole.
NOTE: Be sure to use the alignment pins. It can minimize positional devi-
ations that may be caused by the removal/installation of the robot for main-
tenance and reduce vibration during operation.
5. Set the robot into place on the robot mount. When transporting the robot, follow the
instructions given in Transporting the Robot on page 18.