Process pi [speed control, Pi config, Pi status – Rockwell Automation 1336S Plus FRN 1.xx-5.xx User Manual
Page 125
5–47
Programming
This group of parameters configures the Process PI Regulator.
Process PI
[Speed Control]
This parameter selects the type of speed modulation
active in the drive.
This parameter cannot be changed while the drive is
running.
Important: If encoder feedback closed loop speed
regulation is required, “Encoder Fdbk” must be
selected.
Parameter Number
77
Parameter Type
Read and Write
Factory Default
“Slip Comp” (“No Control” frn < 4.01)
Units
Display Drive
“No Control” 0
Frequency regulation
“Slip Comp” 1
Slip compensation
“Speed Droop” 2
Negative slip compensation
“PLL” 3
Phase lock loop (requires frn < 4.01)
“Encoder Fdbk” 4
Encoder feedback–closed loop
“Droop + Reg” 5
Enc. fdbk.–closed loop w/ active droop
“P Jump” 6
Traverse function
“Process PI” 7
Closed loop PI control
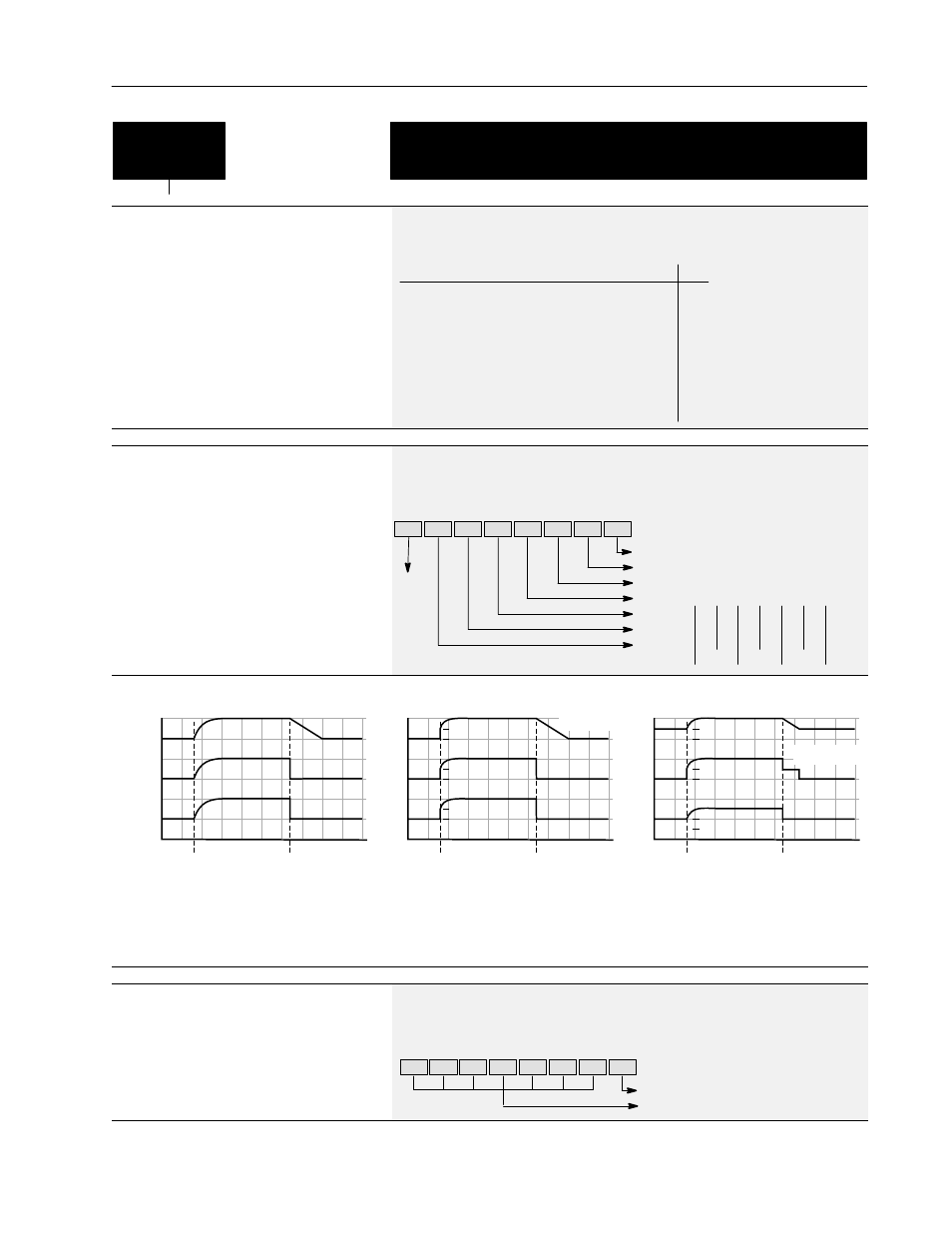
[PI Config]
This parameter sets and displays the configuration
for the PI regulator.
Note: Reset Integrator (Int) is also available through
a digital input. See Input Mode Selection in Chapter
2.
Parameter Number
213
Parameter Type
Read/Write
Factory Default
00000000
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Inv Error – Changes sign of PI Error
Reset Int – Holds KI at zero
Zero Clamp – Prevents bidirectional operation
Sqrt Fdbk – Uses square root of PI feedback value
Set Output 0
0
0
0
1
1
Preload Int 0
0
1
1
0
0
PI Enable
0
1
0
1
0
1
Diagram
1
2
3
Spare
Diagram 1
Time
Enable
PI
Output
Command
Output
Freq.
Disable
0
24
21
27
30
18
15
12
9
6
3
Enable PI output integrates from zero – drive ramps to
regulated frequency.
Disable PI output is forced to zero – drive ramps to
unregulated frequency.
Enable PI output steps to preload and integrates from
there – drive steps to preload and ramps from
there.
Disable PI output is forced to zero - drive ramps to
unregulated frequency.
Enable PI output integrates from preload – drive
ramps from preload.
Disable PI output is held at preload - drive ramps to
unregulated speed (min. preload).
Note:
Drive will step output equal to preload on start.
Diagram 2
Enable
Disable
0
24
21
27
30
18
15
Preload
12
9
6
3
Diagram 3
Enable
Disable
0
24
21
27
30
18
15
12
9
6
3
Preload
Preload
Preload at Start
Preload at Start
Preload
Feed forward effect for
more dynamic response
Better response for
well defined systems
[PI Status]
This parameter displays the status of the Process PI
regulator.
Parameter Number
214
Parameter Type
Read Only
Factory Default
None
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Enabled
Spares