Festo Кабели и принадлежности User Manual
Page 69
5. Data structure
5−11
Festo P.BE−SPC200−COM−CANDN−EN en 0511a
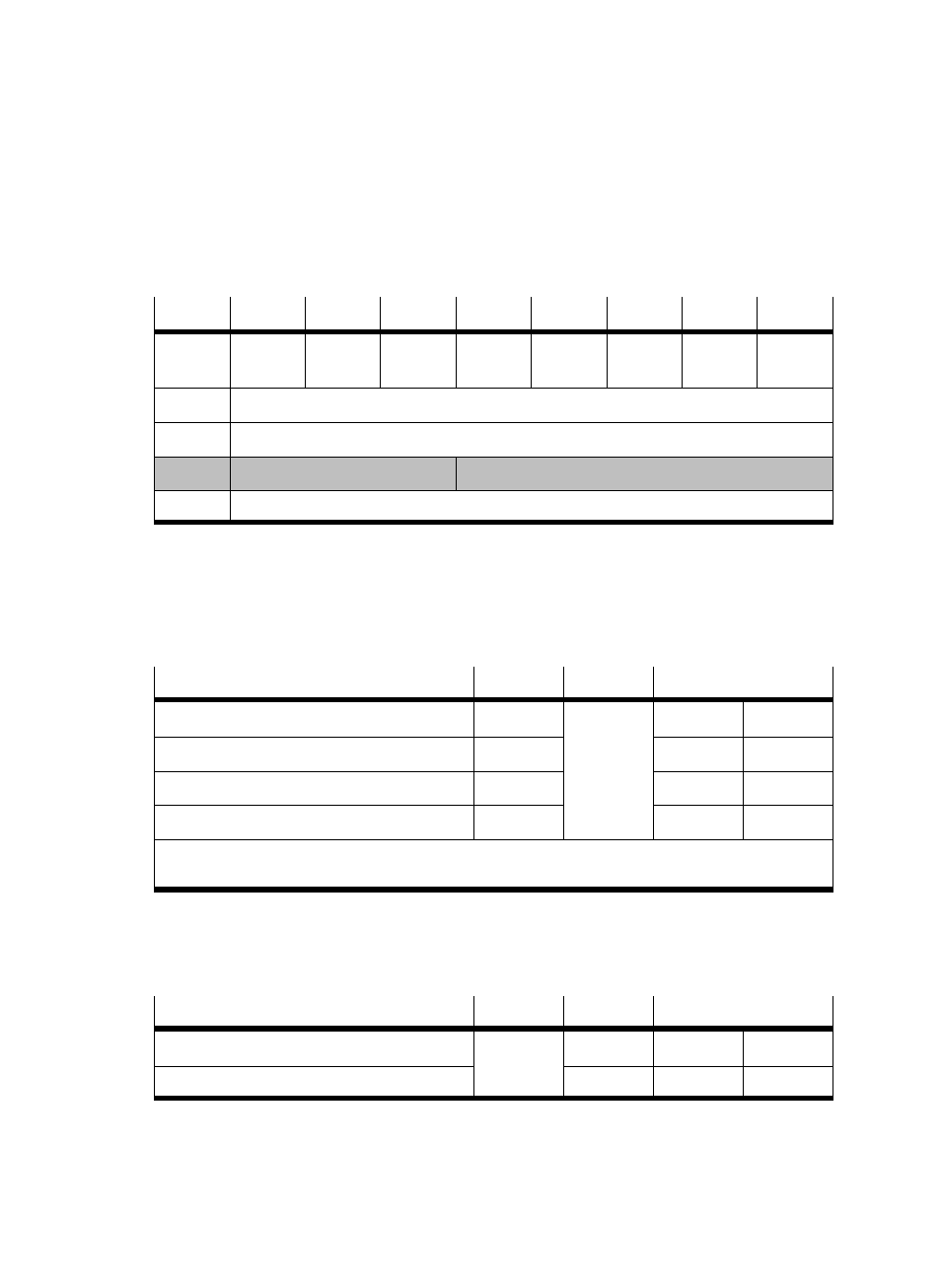
Composition of the Command Message
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
SYNC_IB
SYNC_IA
STOP
START/
RESET
ENABLE
1
2
Command Message type CMT (with update commands always = 0)
3 RMT
Response Axis Number R−AN
Response type RT
4 ... 7
Byte 3 of the
Response Message type (RMT = R−AN + RT),
defines the data which are to be read:
ć
In order to read the
actual positions of the axes, set the
following values in the RMT:
Activity
R−AN
RT
=> RMT
Update the actual position of the X−axis
0 (=> 0h)
01
h,
02
h
01
d
, 02
d
Update the actual position of the Y−axis
1 (=> 20h)
1 / 2
*)
21
h,
22
h
33
d
, 34
d
Update the actual position of the Z−axis
2 (=> 40h)
1 / 2
*)
41
h,
42
h
65
d
, 66
d
Update the actual position of the U−axis
3 (=> 60h)
61
h,
62
h
97
d
, 98
d
*)
1" supplies a reply in the format signed 32 bit";
2" supplies a reply in the format float 32 bit (IEEE 754)"
ć
In order to read the
field bus outputs of the SPC200
(Q10.0 ... Q13.15), set the following values in the RMT:
(only in Start/Stop mode)
Activity
R−AN
RT
=> RMT
Update FB output Q10.0 ... Q11.15
0
3
03
h
03
d
Update FB output Q12.0 ... Q13.15
4
04
h
04
d