IAI America CON-PGA User Manual
Page 48
5. Operation of CON Related Controllers
40
(11) Stop mode
Define the power-saving mode to be used while the actuator is standing by after completion of positioning to
the target position set in the "Position" field of the applicable position number.
0: Disable power-saving mode
* The factory setting is 0 (Disable).
1: Auto servo OFF mode, with the delay time defined by parameter No. 36
2: Auto servo OFF mode, with the delay time defined by parameter No. 37
3: Auto servo OFF mode, with the delay time defined by parameter No. 38
4: Full servo control mode
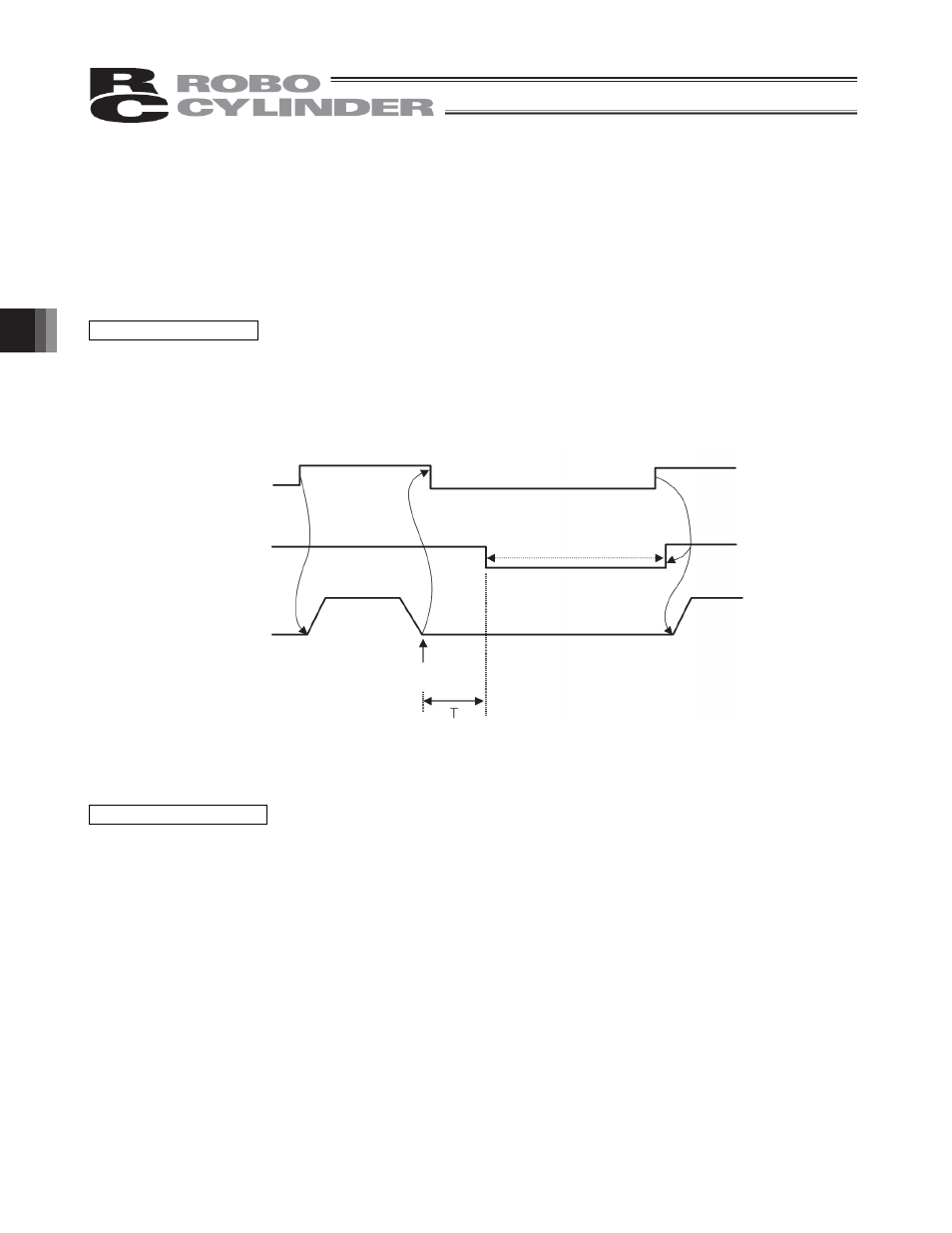
Auto servo OFF mode
The servo is turned OFF automatically upon elapse of a specified time after completion of positioning.
(Since holding current does not flow, power consumption is reduced.)
When the PLC issues the next movement command, the servo is turned ON and then the actuator starts
moving.
(Note) For RACON and RPCON cannot be setting.
Full servo control mode
The holding current can be decreased by servo-controlling the pulse motor.
Although the rate of decrease in holding current varies depending on the actuator model, loading condition,
etc., the holding current decreases to approx. one-half to one-quarter.
Note that the servo remains ON, meaning that unwanted position shift does not occur.
The actual holding current can be checked on the current monitor screen of the PC software.
Movement command
Servo status
Actuator movement
Servo ON status
Servo OFF in auto mode
(A green LED blinks.)
Target position
T: Delay time (in seconds) after the
positioning is completed until the servo
turns OFF. T is set by a parameter.