Parameter settings, 1 parameter table – IAI America ERC2 User Manual
Page 94
6. Parameter Settings
75
6. Parameter Settings
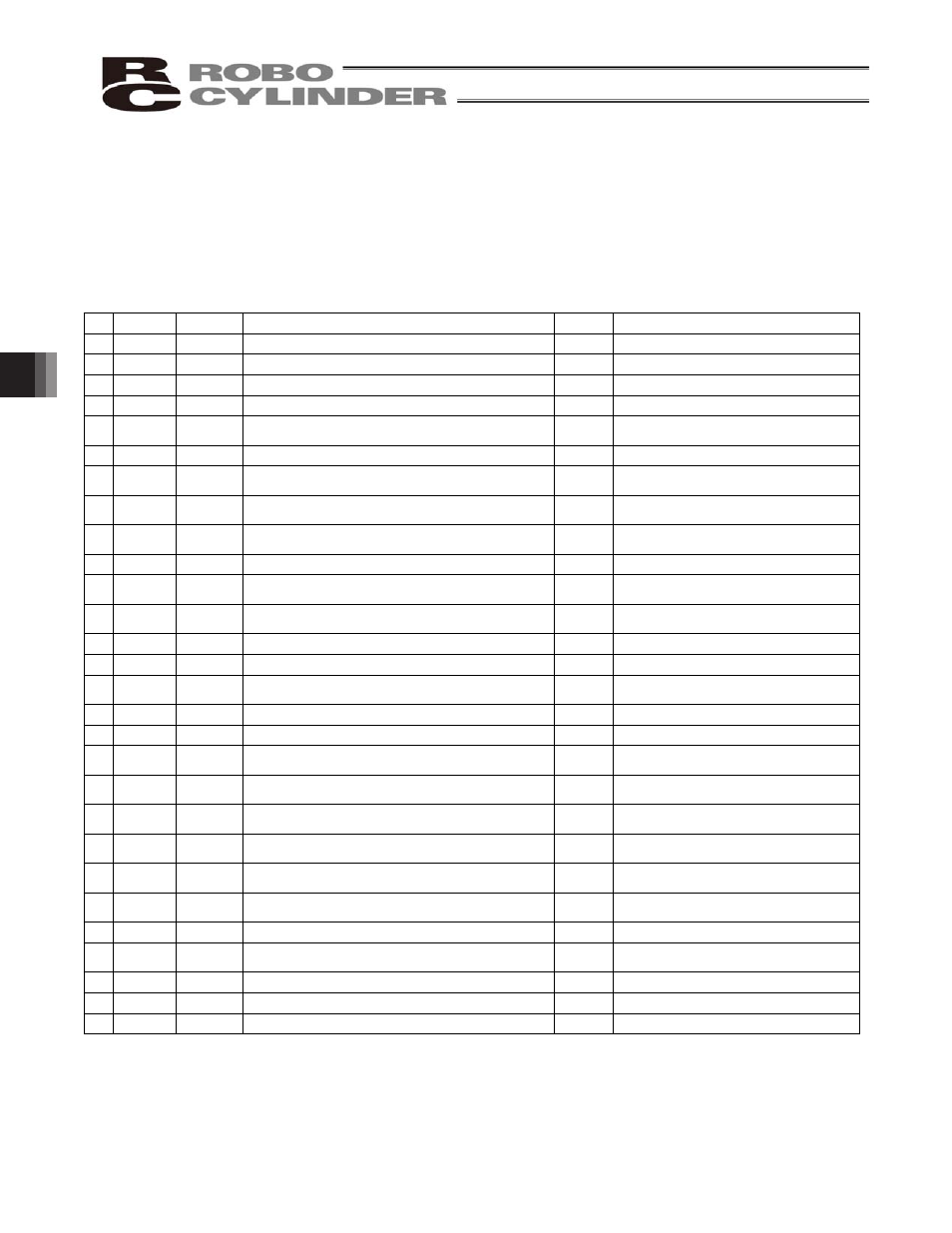
6.1 Parameter Table
Parameters are classified into four types according to their content.
Category: a: Parameter relating to the actuator stroke range
b: Parameter relating to the actuator operating characteristics
c: Parameter relating to the external interface
d: Servo gain adjustment
No. Category Symbol
Name
Unit
Default factory setting
1
a
ZONM Zone boundary 1+
mm
Effective actuator length
2
a
ZONL
Zone boundary 1–
mm
Effective actuator length
3
a
LIMM
Soft limit+
mm
Effective actuator length
4
a
LIML
Soft limit–
mm
Effective actuator length
5
a
ORG
Home return direction
(0: Reverse/1: Forward)
-
(In accordance with the specification at the
time of order)
6
b
PSWT Push & hold stop judgment period
msec
255
7
d
PLG0
Servo gain number
-
Set individually in accordance with the
actuator characteristics.
8
b
VCMD Default speed
mm/sec
Set individually in accordance with the
actuator characteristics.
9
b
ACMD Default acceleration/deceleration
G
Set individually in accordance with the
actuator characteristics.
10
b
INP
Default positioning band (in-position)
mm
0.10
12
b
SPOW Current-limiting value at standstill during positioning
%
Set individually in accordance with the
actuator characteristics.
13
b
ODPW Current-limiting value during home return
%
Set individually in accordance with the
actuator characteristics.
16
c
BRSL
SIO communication speed
bps
230400
17
c
RTIM
Minimum delay time for slave transmitter activation
msec
5
22
a
OFST
Home return offset
mm
Set individually in accordance with the
actuator characteristics.
23
a
ZNM2
Zone boundary 2+
mm
Effective actuator length
24
a
ZNL2
Zone boundary 2–
mm
Effective actuator length
28
b
PHSP1 Default direction of excited-phase signal (0: Reverse/1:
Forward)
-
Set individually in accordance with the
actuator characteristics.
29
b
PHSP2 Excited-phase signal detection time
msec
Set individually in accordance with the
actuator characteristics.
31
d
VLPG
Speed loop proportional gain
-
Set individually in accordance with the
actuator characteristics.
32
d
VLPT
Speed loop integral gain
-
Set individually in accordance with the
actuator characteristics.
33
d
TRQF
Torque filter time constant
-
Set individually in accordance with the
actuator characteristics.
34
b
PSHV
Push speed
mm/sec
Set individually in accordance with the
actuator characteristics.
35
b
SAFV
Safety speed
mm/sec
100
39
c
FPIO
Output mode of position complete signal
(0: PEND/1: INP)
-
0 [PEND]
45
c
SIVM
Silent interval multiplication factor
times
0 (Multiplication factor is not applied)
46
b
OVRD Speed override
%
100
53
b
CTLF
Default standstill mode
-
0 [Complete stop]
(Note) The numbers are displayed in the PC software, but not on the teaching pendant.
Skipped numbers are not used and therefore omitted.
The classification codes are provided for the sake of convenience and are not displayed either in the PC
software or on the teaching pendant.