IAI America ERC2 User Manual
Page 74
5. Explanation of Operating Functions
55
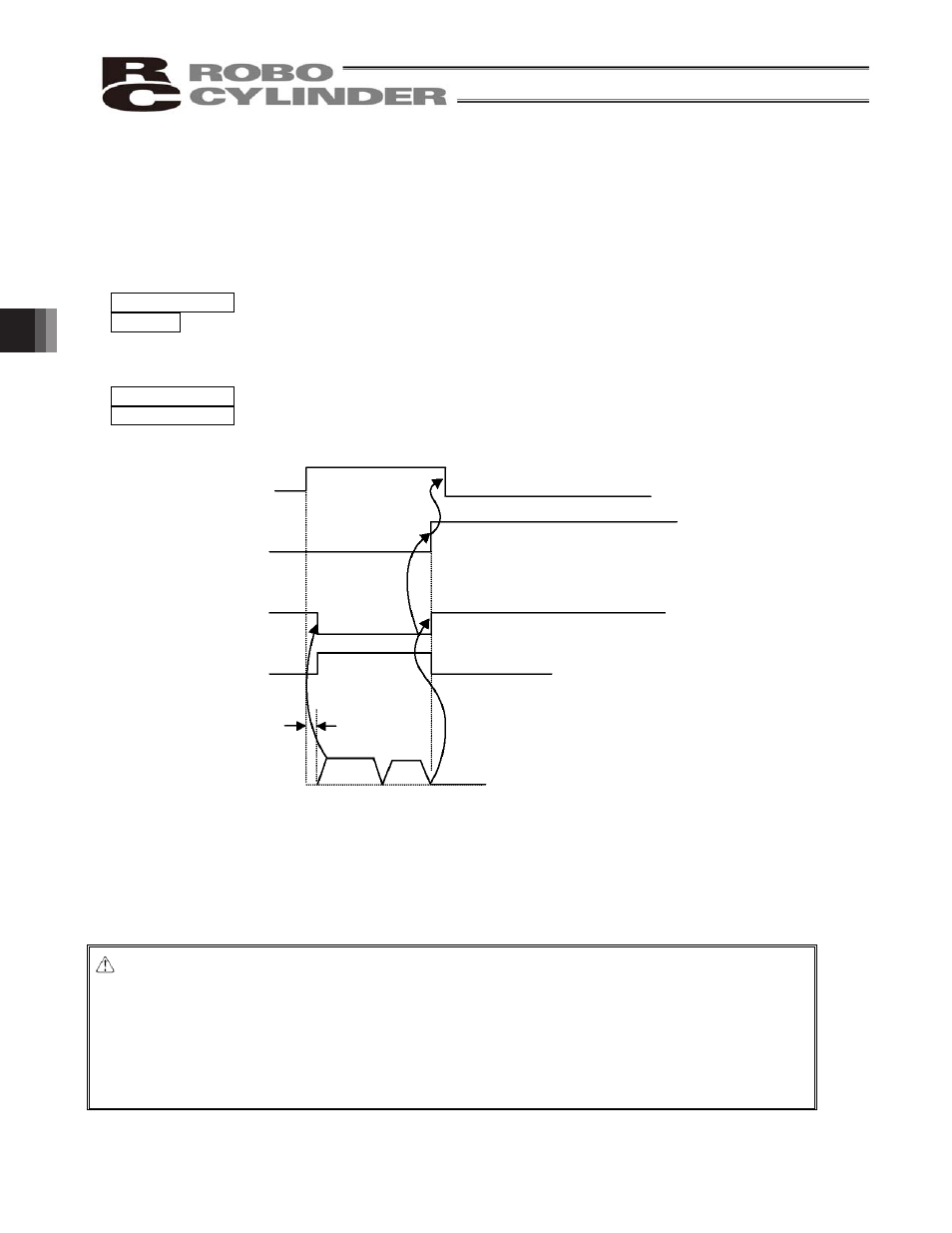
1 msec max.
Home return
command (HOME)
Home return
completion (HEND)
Position complete
(PEND)
Moving (MOVE)
Actuator movement
Power
on
po
si
tio
n
[1] [2]
M
ec
ha
ni
ca
l e
nd
H
om
e
po
si
tio
n
5.3.3 Home Return Operation
This controller uses an incremental position detector (encoder), and will therefore lose its mechanical
coordinates once the power is cut off.
For this reason, home return must be performed to establish mechanical coordinates every time the power is
turned on.
To perform home return operation, input a home return command (HOME).
Operation timings
PLC processing 1: The home return command (HOME) signal turns ON when the start button is pressed.
Operation:
[1] The actuator starts moving toward the mechanical end on the home side.
[2] The actuator contacts the mechanical end and reverses its direction, moves to the
home position, and then pauses.
o
The home return completion (HEND) signal turns ON.
PLC processing 2: The home return command (HOME) signal turns OFF.
PLC processing 3: Continuous operation starts.
Caution: Take note of the following points when performing home return:
[1] Confirm that no obstacles are present in the home return path.
[2] If any obstacle is found in the home return path, move the actuator to the opposite
direction first and remove the obstacle.
[3] Changing the home return command bit to “1” will change the position complete bit to
“0” and the moving output bit to “1.”
Reset the home return command bit to “0” after confirming that the home return
completion bit has turned “1.”