IAI America ERC2 User Manual
Page 66
5. Explanation of Operating Functions
47
5.3.1 Control Signals and Control Data
To operate the actuator via serial communication, the internal 16-bit memory (Modbus registers and statuses) of
the controller must be written/read. The key signals and symbols used in these operations are explained below.
For details, refer to the Operation Manual for Serial Communication Protocol.
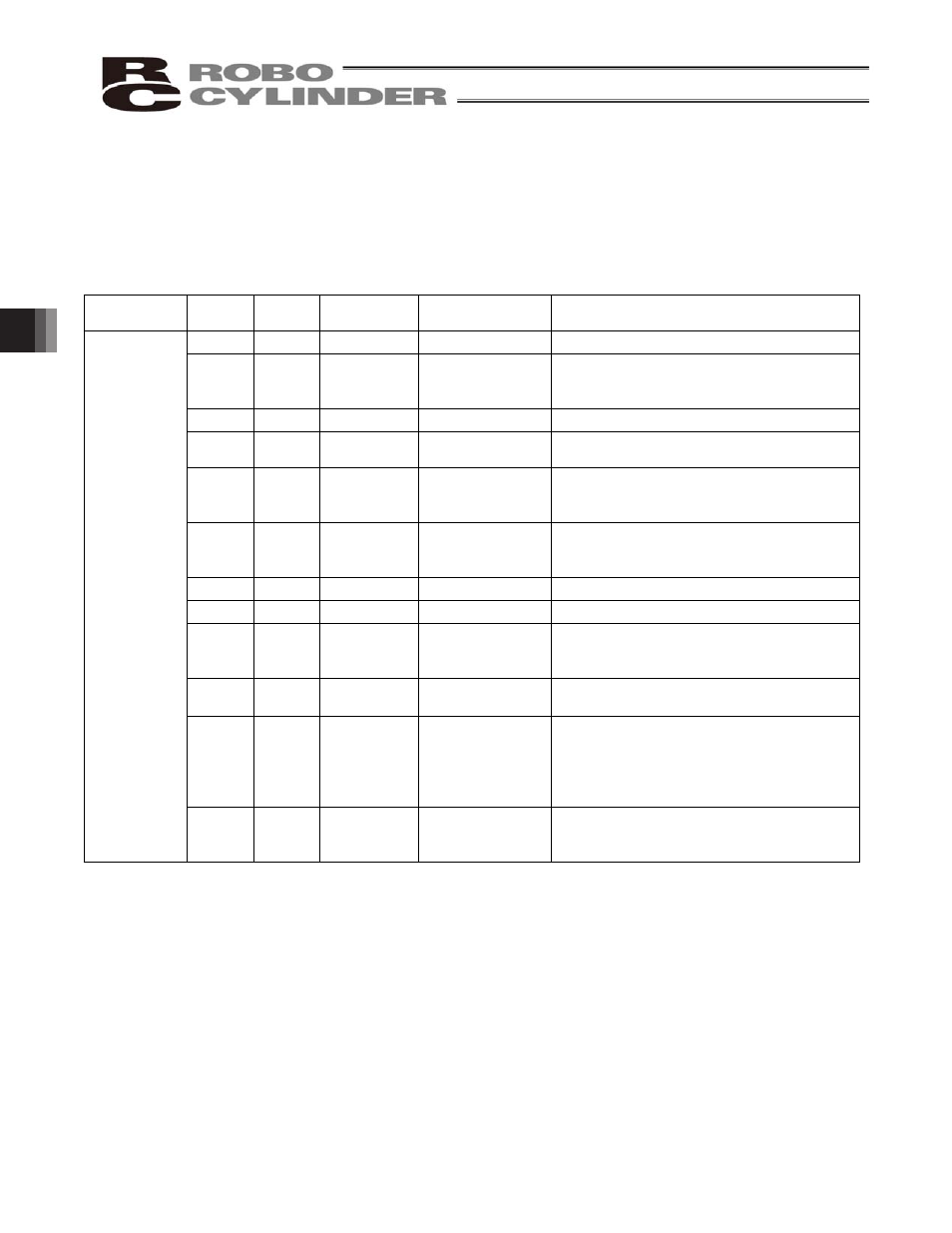
(1) Controller input signals
(PLC o Controller)
Register
Bit
address
Bit
position
Signal
symbol
Signal name
Description
15
-
-
-
0401H
14
SFTY
Safety speed
command
When this bit is “0,” the safety speed set by
the parameter is disabled. When the bit is
“1,” the safety speed is enabled.
13
-
-
-
0403H
12
SON
Servo ON
command
The servo is off when this bit is “0” and on
when the bit is “1.”
11
to
9
-
-
-
0407H
8
RES
Alarm reset
The “0” status of this bit indicates a normal
condition. Present alarms will be reset at
the “0” o “1” edge of this bit.
7
-
-
-
6
-
-
-
040AH
5
STP
Pause command
The “0” status of this bit indicates a normal
condition. When this bit changes to “1,” the
actuator will pause (decelerate to a stop).
040BH
4
HOME
Home return
command
Home return operation will be performed at
the “0” o “1” edge of this bit.
040CH
3
CSTP
Positioning start
The “0” status of this bit indicates a normal
condition. The actuator will start moving to
the target position specified by the
applicable position number at the “0” o “1”
edge of this bit.
Device
control
register
DRG1
Address
0D00H
[Common]
2
to
0
-
-
-
(Note) The meanings of [Common], [POS specification] and [Numerical specification] in the “Register” field are
explained below:
x
[Common]:
The register is used in both the position number specification mode and the
numerical specification mode.
x
[POS specification]:
The register is used in the position number specification mode.
x
[Numerical specification]:
The register is used in the numerical specification mode.