2 data set in the numerical specification mode, 3 explanation of functions – IAI America ERC2 User Manual
Page 65
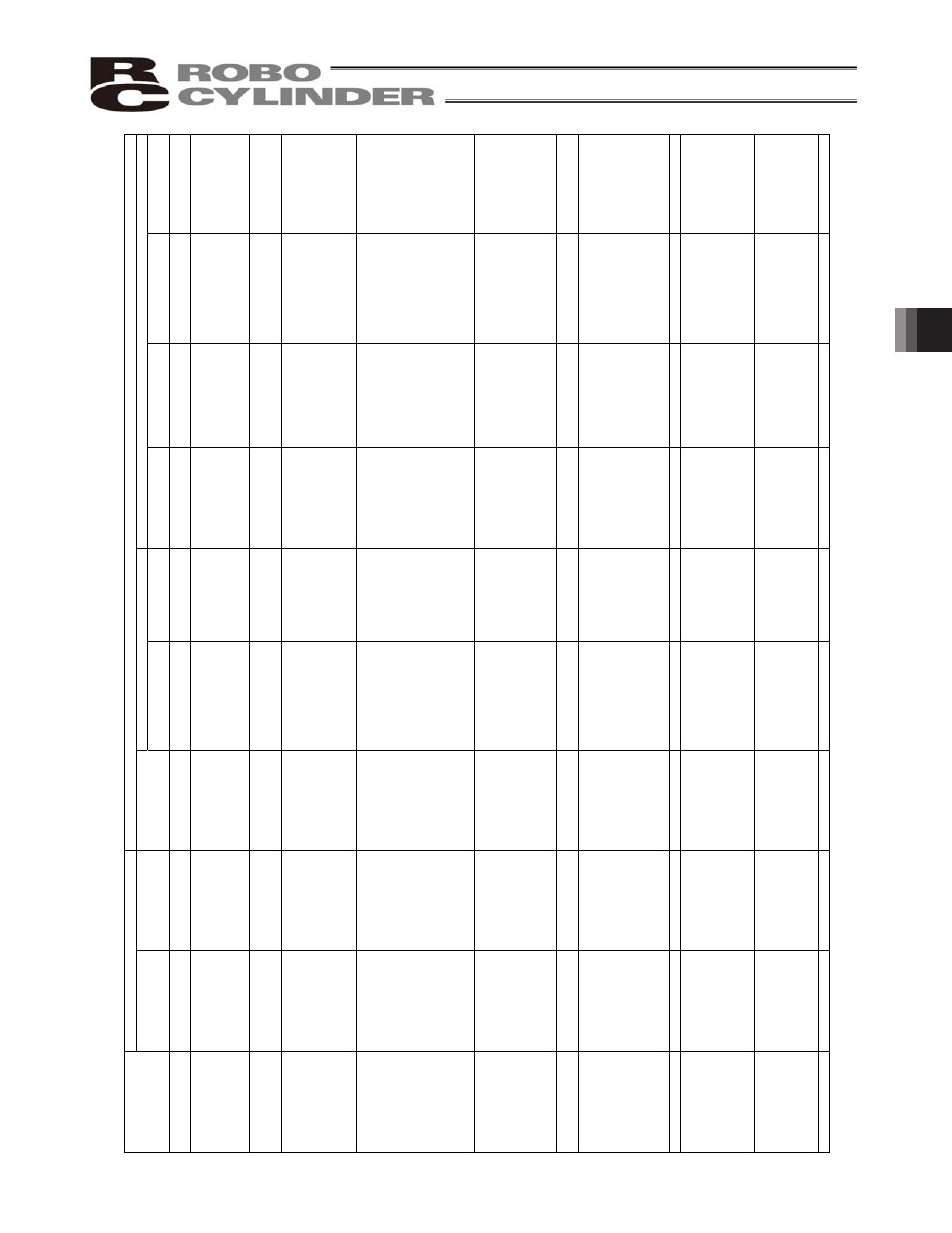
5. Explanation of Operating Functions
46
ERC2
-SE
Fu
nction
Li
st
{
: Di
rec
t c
ontrol
, '
: I
nd
ire
ct
c
on
trol
, X
: N
ot
a
va
ila
bl
e
Position
numb
er sp
ecification
mod
e
Numeric
al spe
cificati
on mod
e
De
viceN
et gat
ew
ay
CC-Link
gate
wa
y
Serial
communi
catio
n
Gate
w
ay
Position
numb
er
specifica
tion m
ode
Serial
communi
catio
n
Direct nu
meric
al
specifica
tion m
ode
Comman
d
specifica
tion m
ode
Position
data l
imited
mode
Normal p
ositio
ning
mode
Push &
hold
mode
Comman
d
specifica
tion m
ode
Home ret
urn
operatio
n
{
{
{
{
{
{
{
{
{
Positioni
ng
operatio
n
'
Specif
y
a
position
numb
er
in the p
osition
table.
'
Same as
on t
he
left
{
Specif
y
positio
n
data dir
ectl
y.
{
Specif
y
positio
n
data dir
ectl
y.
{
S
pe
ci
fy
p
os
iti
on
da
ta
d
ire
ct
ly
.
{
S
pe
ci
fy
a
po
si
tio
n
nu
m
be
r
in
th
e
po
si
tio
n
ta
bl
e.
{
Specif
y
positio
n
data dir
ectl
y.
{
Specif
y
positio
n
data dir
ectl
y.
{
Specif
y
positio
n
data dir
ectl
y.
{
S
pe
ci
fy
p
os
iti
on
da
ta
d
ire
ct
ly
.
{
S
pe
ci
fy
a
p
os
iti
on
nu
m
be
r i
n
th
e
po
si
tio
n
ta
bl
e.
Speed
settin
g
'
Set in th
e
position
table.
'
Same as
on t
he
left
{
Specif
y
directl
y
as a nu
merical
val
ue.
{
Specif
y
directl
y as
a numeri
cal
va
lue.
'
Set in th
e
position
table.
'
Set usin
g a
paramet
er.
{
Specif
y
directl
y as
a numeri
cal
val
ue.
{
Specif
y
directl
y as
a numeri
cal
va
lue.
'
Set in th
e
position
table.
Accelera
tion/
deceler
ation s
etting
'
Set acc
elerati
on
an
d d
ec
el
er
at
io
n
differentl
y in t
he
position
table.
'
Same as
on t
he
left
{
S
pe
ci
fy
a
n
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
di
re
ct
ly
a
s
a
nu
m
er
ica
l v
al
ue
.
{
S
pe
ci
fy
a
n
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
di
re
ct
ly
as
a
n
um
er
ic
al
va
lu
e.
'
Set accelera
tion
an
d
deceler
ation
separat
el
y in
the posi
tion
table.
{
S
et
a
n
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
us
in
g
a
pa
ra
m
et
er
.
{
S
pe
ci
fy
a
n
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
di
re
ct
ly
a
s
a
nu
m
er
ic
al
v
al
ue
.
{
S
pe
ci
fy
a
n
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
di
re
ct
ly
as
a
n
um
er
ic
al
v
al
ue
.
'
Set in th
e
position
table.
Operatio
n b
y
settin
g
accelera
tion a
nd
deceler
ation
differentl
y
'
Set acc
elerati
on
an
d d
ec
el
er
at
io
n
differentl
y in t
he
position
table.
'
Same as
on t
he
left
{
A
cc
el
er
at
io
n/
de
ce
le
ra
tio
n
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
s
ta
rte
d.
To
s
pe
ci
fy
a
de
ce
le
ra
tio
n
di
ffe
re
nt
fro
m
a
n
ac
ce
le
ra
tio
n,
th
er
ef
or
e,
c
ha
ng
e
th
e
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
da
ta
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
a
nd
th
en
re
st
ar
t t
he
op
er
at
io
n.
{
A
cc
el
er
at
io
n/
de
ce
le
ra
tio
n
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
s
ta
rte
d.
T
o
sp
ec
ify
a
d
ec
el
er
at
io
n
di
ffe
re
nt
fr
om
a
n
acce
le
ra
tio
n,
th
er
ef
or
e,
ch
an
ge
th
e
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
da
ta
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
a
nd
th
en
re
st
ar
t
th
e
op
er
at
io
n.
'
Set accelera
tion
an
d
deceler
ation
separat
el
y in
the posi
tion
table.
X Since
an
accelera
tion/d
ecele
r
ation is s
et b
y
a
single p
arame
ter,
accelera
tion a
nd
deceler
ation c
anno
t
be set d
iffere
ntl
y.
{
A
cc
el
er
at
io
n/
de
ce
le
ra
tio
n
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
s
ta
rte
d.
T
o
sp
ec
ify
a
d
ec
el
er
at
io
n
di
ffe
re
nt
fr
om
a
n
acce
le
ra
tio
n,
th
er
ef
or
e,
ch
an
ge
th
e
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
da
ta
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
a
nd
th
en
re
st
ar
t t
he
o
pe
ra
tio
n.
{
A
cc
el
er
at
io
n/
de
ce
le
ra
tio
n
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
st
ar
te
d.
T
o
sp
eci
fy
a
de
ce
le
ra
tio
n
di
ffe
re
nt
fr
om
an
a
cc
el
er
at
io
n,
th
er
ef
or
e,
ch
an
ge
th
e
ac
ce
le
ra
tio
n/
de
ce
le
ra
tio
n
da
ta
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
a
nd
th
en
re
st
ar
t
th
e
op
er
at
io
n.
'
Set acc
elerati
on
an
d d
ec
el
er
at
io
n
separat
el
y in t
he
position
table.
Pitch (inc
reme
ntal)
fe
ed
'
Set in th
e
position
table.
'
Same as
on t
he
left
{
Cha
nge b
it 2 of
the CT
LF contr
ol
flag to “
1” to p
erform
increme
ntal
operatio
n.
X
N
o
di
re
ct
c
om
m
an
d
is
av
ai
la
bl
e
to
p
ro
ce
ss
a
pi
tch
fe
ed
re
qu
es
t.
Pr
og
ra
m
th
e
ho
st
P
LC
to
ad
d
or
s
ub
tra
ct
a
c
on
st
an
t
tra
ve
l t
o/
fro
m
th
e
cu
rre
nt
po
si
tio
n
an
d
th
en
is
su
e
a
po
si
tio
n
co
m
m
an
d.
'
Set in th
e
position
table.
X
N
o
di
re
ct
c
om
m
an
d
is
a
va
ila
bl
e
to
p
ro
ce
ss
a
pi
tch
fe
ed
re
qu
es
t.
Pr
og
ra
m
th
e
ho
st
P
LC
to
a
dd
o
r s
ub
tra
ct
a
co
ns
ta
nt
tr
av
el
to
/fr
om
th
e
cu
rr
en
t p
os
iti
on
a
nd
th
en
is
su
e
a
po
si
tio
n
co
m
m
an
d.
X
N
o
di
re
ct
c
om
m
an
d
is
av
ai
la
bl
e
to
p
ro
ce
ss
a
pi
tch
fe
ed
re
qu
es
t.
Pr
og
ra
m
th
e
ho
st
P
LC
to
ad
d
or
s
ub
tra
ct
a
co
ns
ta
nt
tr
av
el
to
/fr
om
th
e
cu
rr
en
t p
os
iti
on
a
nd
th
en
is
su
e
a
po
si
tio
n
co
m
m
an
d.
X
N
o
di
re
ct
c
om
m
an
d
is
av
ai
la
bl
e
to
p
ro
ce
ss
a
pi
tch
fe
ed
re
qu
es
t.
Pr
og
ra
m
th
e
ho
st
P
LC
to
ad
d
or
s
ub
tra
ct
a
c
on
st
an
t
tra
ve
l t
o/
fro
m
th
e
cu
rre
nt
po
si
tio
n
an
d
th
en
is
su
e
a
po
si
tio
n
co
m
m
an
d.
'
Set in th
e
position
table.
Push &
hold
operatio
n
'
Set in th
e
position
table.
'
Same as
on t
he
left
{
{
Specif
y
positio
n
data dir
ectl
y.
'
Set in th
e
position
table.
X
X
{
'
Set in th
e
position
table.
S
pe
ed
c
ha
ng
e
during m
ov
em
ent
'
Combin
e t
w
o
or
more po
sition
numbers
.
'
Same as
on t
he
left
{
Sp
ee
d
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
s
ta
rte
d.
To
c
ha
ng
e
th
e
sp
ee
d
du
rin
g
m
ov
em
en
t,
th
er
ef
or
e,
c
ha
ng
e
th
e
sp
ee
d
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
a
nd
th
en
re
st
ar
t t
he
op
er
at
io
n.
{
Sp
ee
d
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
s
ta
rte
d.
T
o
ch
an
ge
th
e
sp
ee
d
du
rin
g
m
ov
em
en
t,
th
er
ef
or
e,
ch
an
ge
th
e
sp
ee
d
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
an
d
th
en
re
st
ar
t t
he
op
er
at
io
n.
'
Combin
e t
w
o
or
more po
sition
numbers
.
X
{
Sp
ee
d
da
ta
is
ac
ce
pt
ed
w
he
n
po
si
tio
ni
ng
is
s
ta
rte
d.
T
o
ch
an
ge
th
e
sp
ee
d
du
rin
g
m
ov
em
en
t,
th
er
ef
or
e,
ch
an
ge
th
e
sp
ee
d
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
an
d
th
en
re
st
ar
t t
he
op
er
at
io
n.
{
Sp
ee
d
da
ta
is
a
cc
ep
te
d
w
he
n
po
si
tio
ni
ng
is
st
ar
te
d.
T
o
ch
an
ge
th
e
sp
ee
d
du
rin
g
m
ov
em
en
t,
th
er
ef
or
e,
c
ha
ng
e
th
e
sp
ee
d
w
hi
le
th
e
ac
tu
at
or
is
m
ov
in
g,
a
nd
th
en
re
st
ar
t
th
e
op
er
at
io
n.
'
Combin
e t
w
o
or
more po
sition
numbers
.
P
au
se
{
{
{
{
{
{
{
{
{
Zone sig
nal
{
Zon
e sign
als ar
e
set in th
e posi
tion
table or
using
user
paramet
ers.
PZONE,
ZONE
1
and ZO
NE2 c
an be
output.
{
Zon
e sign
als ar
e
set usin
g user
paramet
ers. Z
ONE1
and ZO
NE2 c
an be
output.
{
Zon
e sign
als ar
e
set usin
g user
paramet
ers. Z
ONE1
and ZO
NE2 c
an be
output.
X
Th
is
fu
nc
tio
n
is
n
ot
av
ai
la
bl
e
fo
r s
im
pl
e
nu
m
er
ic
al
sp
ec
ifi
ca
tio
n
ax
es
Po
si
tio
ne
r o
pe
ra
tio
n:
O (D
ep
en
di
ng
o
n
th
e
PI
O
p
at
te
rn
)
X
X
X
Th
is
fu
nc
tio
n
is
n
ot
av
ai
la
bl
e
fo
r s
im
pl
e
nu
m
er
ic
al
s
pe
ci
fic
at
io
n
ax
es
.
Po
si
tio
ne
r o
pe
ra
tio
n:
O
(D
ep
en
di
ng
o
n
th
e
PI
O
pa
tte
rn
)
Po
w
er-s
av
ing
mode
{
Th
e
“fu
ll
se
rv
o
co
nt
ro
l”
po
w
er
-sa
vi
ng
m
od
e
ca
n
be
s
el
ec
te
d
us
in
g
pa
ra
m
et
er
N
o.
5
3.
(T
he
a
ut
om
at
ic
s
er
vo
-
of
f m
od
e
ca
nn
ot
b
e
se
le
ct
ed
.)
{
Same as
on t
he left
{
Same as
on t
he left
{
Same as
on t
he left
{
Same as
on t
he
left
{
Same as
on t
he left
{
Same as
on t
he left
{
Same as
on t
he left
{
Same as
on t
he left
Position
table
Require
d
Require
d
Not requ
ired
Not requ
ired
Require
d
Not requ
ired
Require
d
Require
d
Require
d
45
5.2 Data Set in the Numerical Specification Mode
When the actuator is operated in the numerical specification mode, specify data relating to the intended
operation (target position, speed, acceleration/deceleration, positioning band, current-limiting value during push
& hold operation, etc.) directly. Take note that the position table may or may not be required depending on the
operation mode.
For details, refer to the Operation Manual for Gateway Unit and the Operation Manual for Serial Communication
Protocol.
5.3 Explanation of Functions
The table below lists the key functions available on ERC2-SE actuators in the position number specification
mode and the numerical specification mode, respectively.