IAI America ERC2 User Manual
Page 77
5. Explanation of Operating Functions
58
Explanation of operation
[1] When the servo becomes ready after the supply voltage has been turned on, the servo ready (SV) and
position complete (PEND) bits will turn “1.” After confirming that PEND is “1,” specify position 1 and change
the positioning start (CSTR) bit to “1.”
As for the method of position specification, specify a desired position using six bits from PC1 to PC32, or
directly specify it as a numerical value in the register PCMD.
o
PEND will turn “0,” while the moving (MOVE) bit will turn “1,” as soon as the actuator starts home return
operation.
[2] Change CSTR to “0” after confirming that MOVE has turned “1.”
o
The moment the home return is completed (HEND turns “1”), the actuator will start moving to position 1.
[3] When the actuator enters the positioning band (INP) specified with respect to the command value for position
1, PEND will turn “1,” while MOVE will turn “0,” and the completed position number will also be output in the
form of six bits from PM1 to PM32 in the register POSS.
[4] Next, specify position 2 and change CSTR to “1,” in the same manner as explained in [1]. The actuator will
start moving to position 2.
[5] Positioning to position 2 will complete in the same manner as explained in [3].
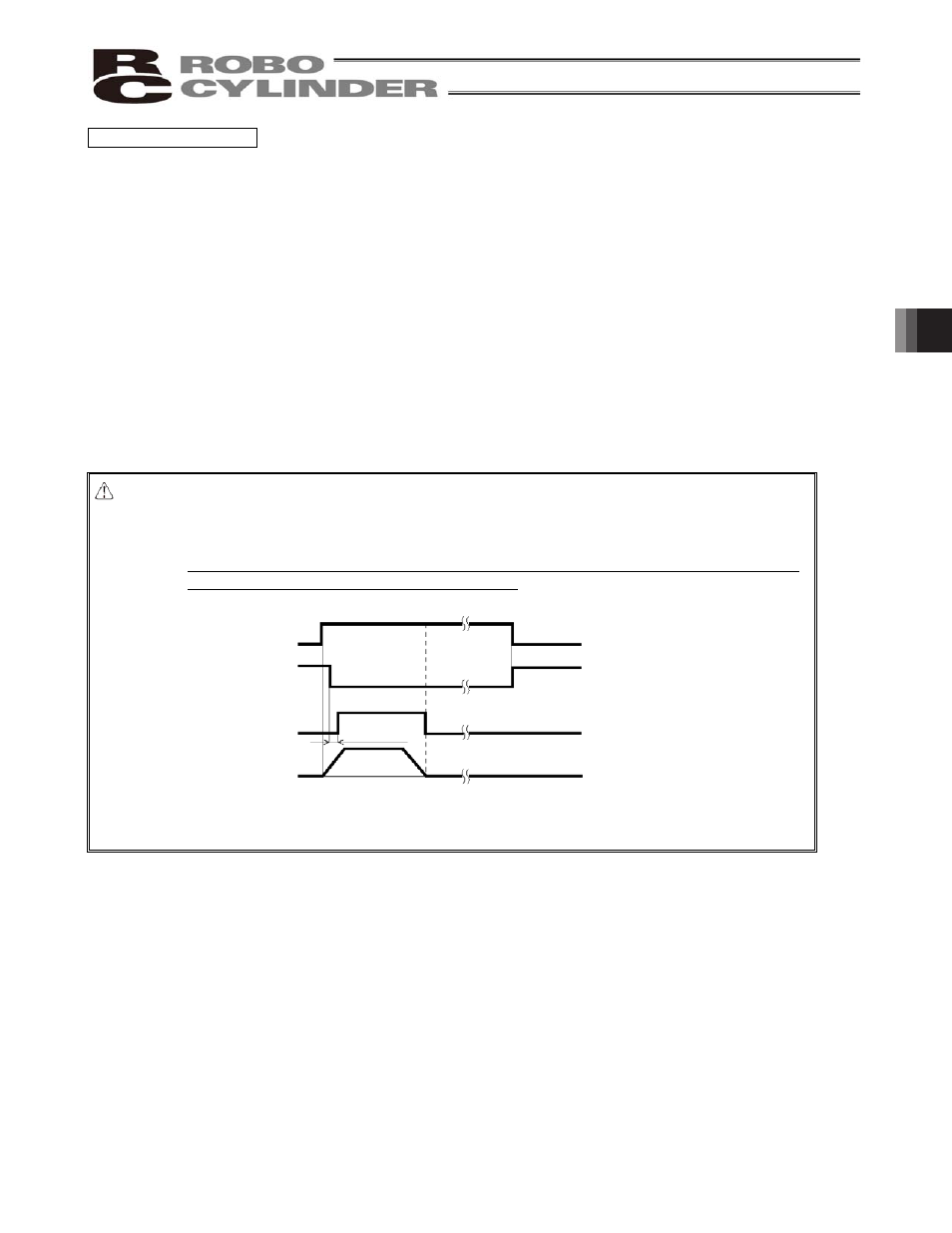
Caution: When the start signal turns ON, the position complete signal will turn OFF and the moving
output will turn ON.
Always turn OFF the start signal after confirming that the moving output has turned ON
(position complete output has turned OFF).
If the start input remains ON, the position complete output will not turn ON even after the
actuator has completed the specified movement, as shown below.
Start
Position
complete
1 msec max.
Movement is complete.
Moving
Actuator