22 overtorque detection – Yaskawa GPD503 Drive User Manual
Page 64
2.22 OVERTORQUE DETECTION
Overtorque detection is used to compare GPD 503 rated output current with the
overtorque detection level. When the output current is equal to or greater than the defined
level, an overtorque condition exists. This will be indicated as an
oL3
fault on the Digital
Operator. This feature can be selected to operate over a wide range of conditions. (Refer to
Appendix 3, Table A3-1.)
Cn-26: Overtorque Detection Level
Factory setting:
160
%
Range: 30 to 200 %
Overtorque detection level determines the point at which the GPD 503 determines that an
overtorque condition exists.
Cn-27: Overtorque Detection Time
Factory setting:
0.1
sec.
Range: 0.0 to 25.5 seconds
Overtorque detection time determines how long an overtorque condition must exist before
another event will occur, e.g. coast to stop, or continue operation when overtorque is
detected.
Sn-07: Overtorque Detection
X X X
0
= Overtorque detection disabled
Mode Select
X X X
1
= Overtorque detection is enabled
The setting of this digit either enables or disables overtorque detection.
X
0
X
1
= Operation continues
X
1
X
1
= Coast stop
Once overtorque detection is selected, the setting of this digit determines GPD 503
operation after the overtorque condition is recognized. The GPD 503 either continues to
operate, or coasts to stop when overtorque is detected.
X X
0 1
= Overtorque detection at set frequency
X X
1 1
= Overtorque detection always detected
The setting of this digit selects when overtorque condition is considered, either only at set
frequency, or always detected (except during stopping and Dynamic Braking).
2-31
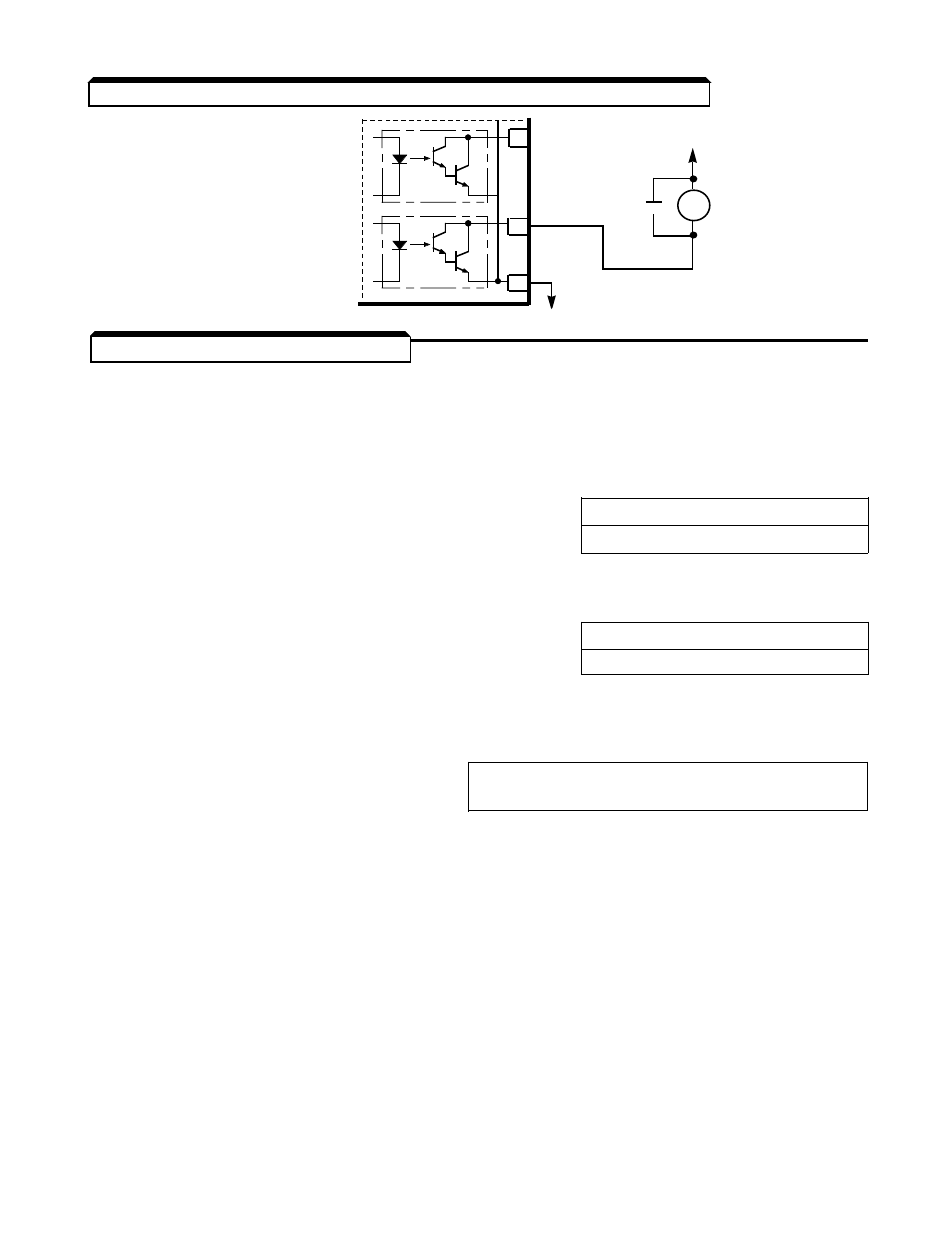
2.21 MULTI-FUNCTION OUTPUT TERMINALS (Term. 9 & 10; 25-27)
Continued
Recommended
Configuration for
DC Relays
25
26
27
C
▲
DC
RELAY
DIODE
48Vdc MAX. *
*
*
* Customer
supplied
•