Configuration, Code table – Lenze EVS9332xS User Manual
Page 243
Configuration
Code table
8.4
l
8.4−2
EDSVS9332S EN 6.0−07/2013
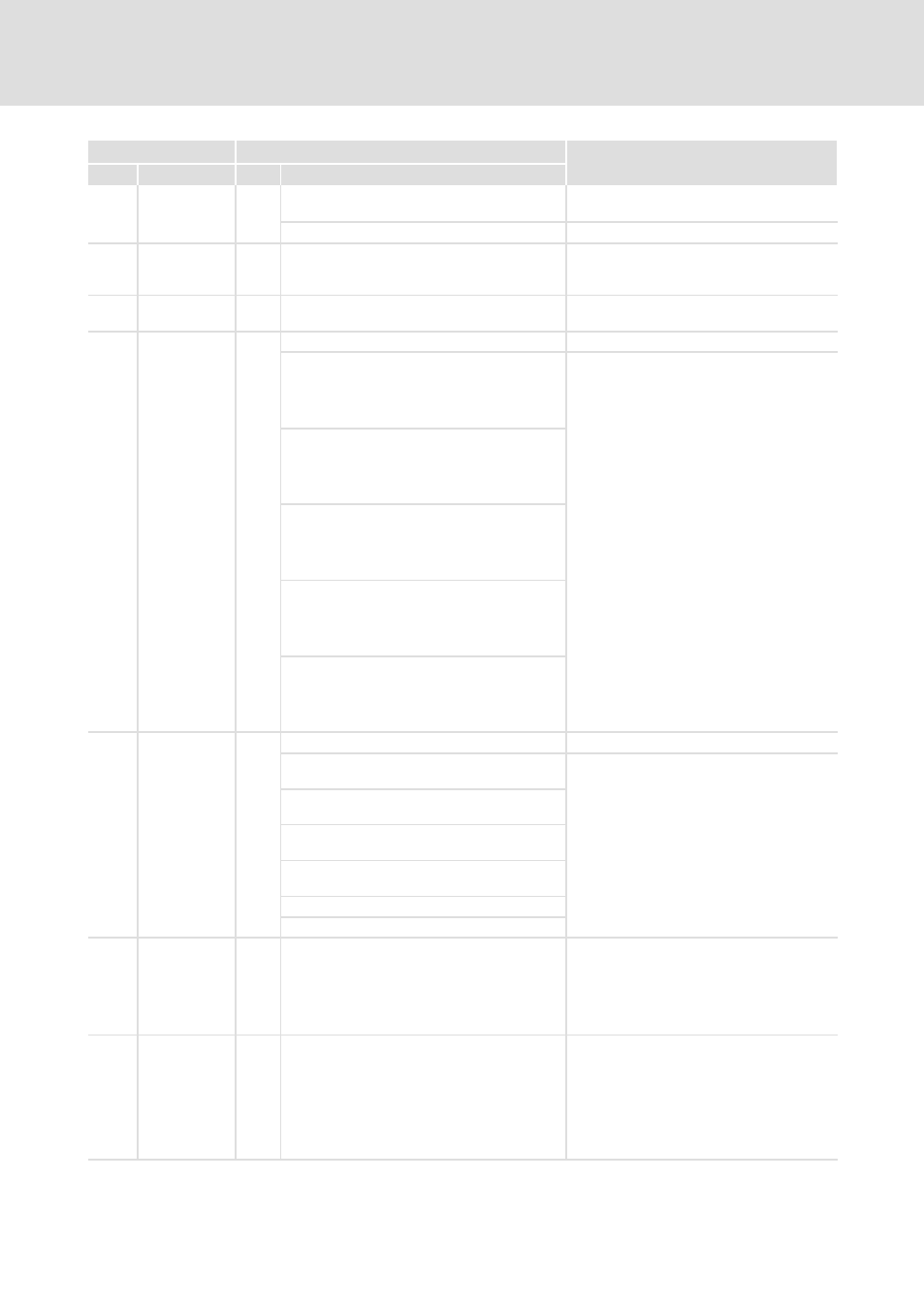
IMPORTANT
Possible settings
Code
Selection
Lenze
Designation
No.
C0005
s
SIGNAL CFG
1000
Signal configuration
(predefined basic configurations)
0
COMMON
Modified basic configuration
1
2
11
86xx −1−
86xx −2−
86xx −11−
Compatible to 86xx frequency inverter
20
21
922x −20−
922x −21−
Compatible to 922xx frequency inverter
C0005
s
SIGNAL CFG
1000 100
empty
All internal links are deleted
1000
Speed control
The first digit indicates the predefined basic
function, e. g.:
l
1xxx: Speed control
l
4xxx: Torque control with speed limitation
The second digit indicates additional
functions
x0xx: No additional function
x1xx: Brake control
x9xx: In the case of quick stop, the complete
drive system is brought to zero speed in a
phase−controlled manner
The third digit indicates the predefined
voltage source for the control terminals:
l
xx0x: External supply voltage
l
xx1x: Internal supply voltage
The fourth digit indicates the predefined
device control:
l
xxx0: Terminal control
l
xxx1: RS232, RS485 or optical fibre
l
xxx3: INTERBUS or PROFIBUS−DP
l
xxx5: System bus (CAN)
4000
Torque control with speed limitation
5000
Master for digital frequency coupling
6000
Slave to digital frequency bus
7000
Slave to digital frequency cascade
C0006
s
OP MODE
à
Motor control operation
1
SSC norm Y sensorless star standard
motor
à
Depending on C0086
l
Change of C0086 resets value to the
assigned default setting
l
Change of C0006 sets C0086 = 0!
2
Servo async. Y asynchronous motor,
star
3
Servo PM−SM Y PM synchronous motor,
star
11
SSC standard motor sensorless
standard motor, delta
22
Servo asyn asychronous motor, delta
C0009 LECOM
ADDRESS
1
1
{1}
99 LECOM device address
Bus device number when operated via
interface
l
10, 20, ..., 90 reserved for broadcast to
device groups for RS232, RS485, fibre
optics.
C0011 NMAX
3000 500
{1 rpm}
16000 Max speed N
max
Reference value for the absolute and relative
setpoint selection for the acceleration and
deceleration times.
l
Parameter setting via interface:
– Greater changes in one step should only
be made when the controller is
inhibited.