Lincoln Electric IM8002 POWER WAVE MANAGER User Manual
Page 108
Appendix B. FANUC Robots
FANUC® Robot Application (Prior to v7.70P/21)
B.2
Power Wave® Manager User Manual
IM8002
Requirements
When you want to implement Production Monitoring™/CheckPoint™ for the FANUC robot, you need to
make sure you have met the following requirements:
ArcTool® Software
The robot must have ArcTool® software version 6.40-1M or later installed. This version includes
two programs, WR_AL_AT.VR and RD_AL_AT.VR that form the basis of Production
Monitoring™/CheckPoint™ robotic interface. These two program names are seen in the Select
Menu program listing along with the all other programs in the robot’s memory.
KAREL Software
The KAREL software function must be enabled. KAREL is a FANUC software tool that performs
functions behind the scenes, out of view, during normal robot operations.
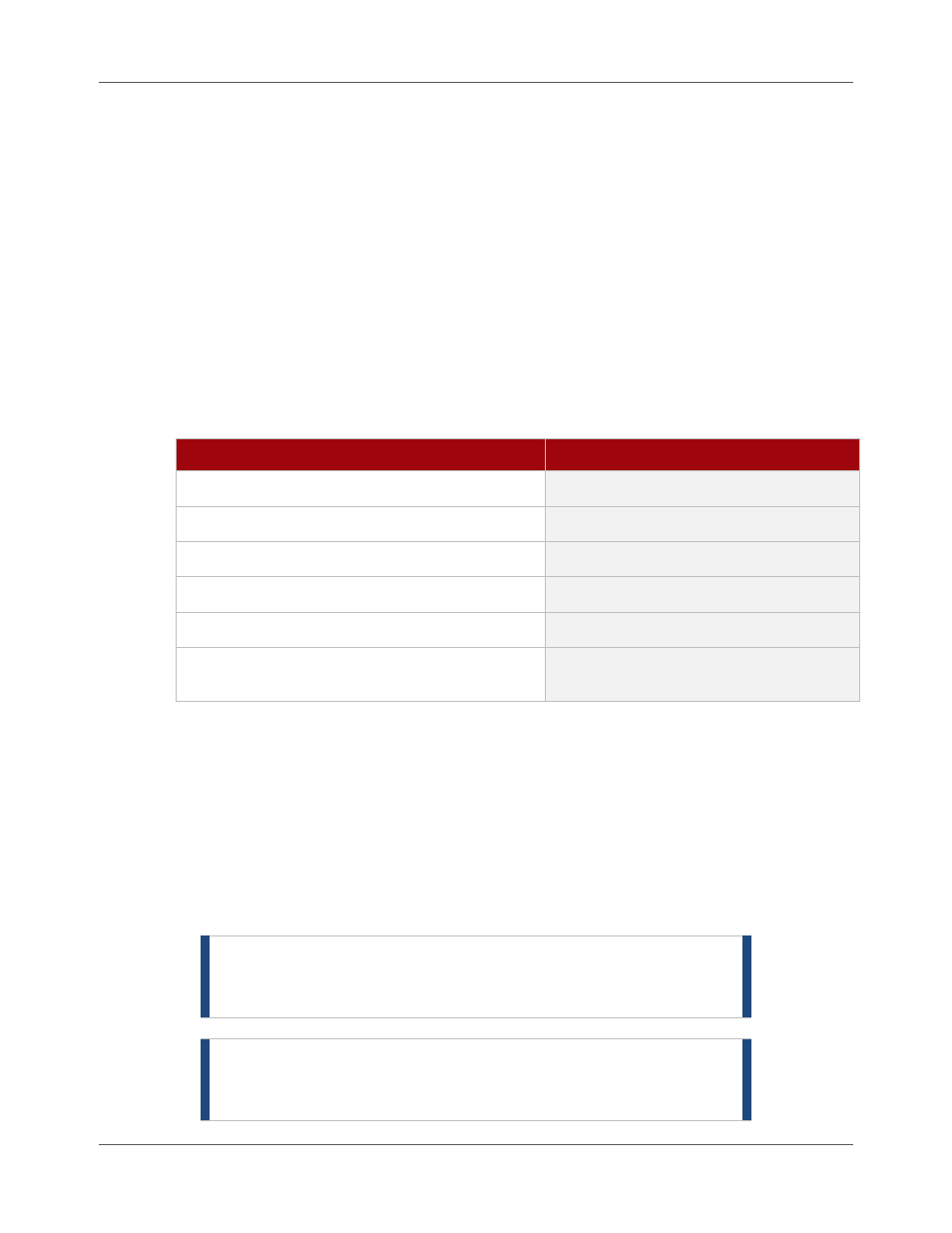
To check to see if it is enabled:
Procedure
Details
1.
Press the Menu key.
2.
Cursor to line 0-next and press Enter.
3.
Cursor to line System and press Enter.
4.
Press F1-Type key.
5.
Cursor to line Variables and press Enter.
6.
Cursor down to line $KAREL_ENB and set the
value to 1 if it isn’t already and press Enter.
Registers
Nine registers need to be set aside and dedicated for Production Monitoring™/CheckPoint™ use.
By default, the robot has 200 registers available for use to perform math functions. (This can be
increased to 500 if needed.) This manual will use registers 1 through 9 for examples.
Ethernet Module
The Welding Power Source must have the Ethernet module installed, set up and running on a
network. A network connection can also be established to the Welding Power Source through
the robot, providing it has been set up, configured, and is running on a network. Refer to
FANUC® documentation for more information.
NOTE |
Production Monitoring™/CheckPoint™ e-mail functionality
is only available when the Welding Power Source is directly
connected to the network.
NOTE |
If the robot is an E-model, an E-Cell for example, the
network connection must be directly to the Welding Power
Source external Ethernet module.