6 mode shedding upon computer failure, 7 initialization at start, 8 alarm processing – Yokogawa YVP110 User Manual
Page 77: Mode shedding upon computer failure -3, Initialization at start -3, Alarm processing -3
<13. AO Function Block>
13-3
IM 21B04C01-01E
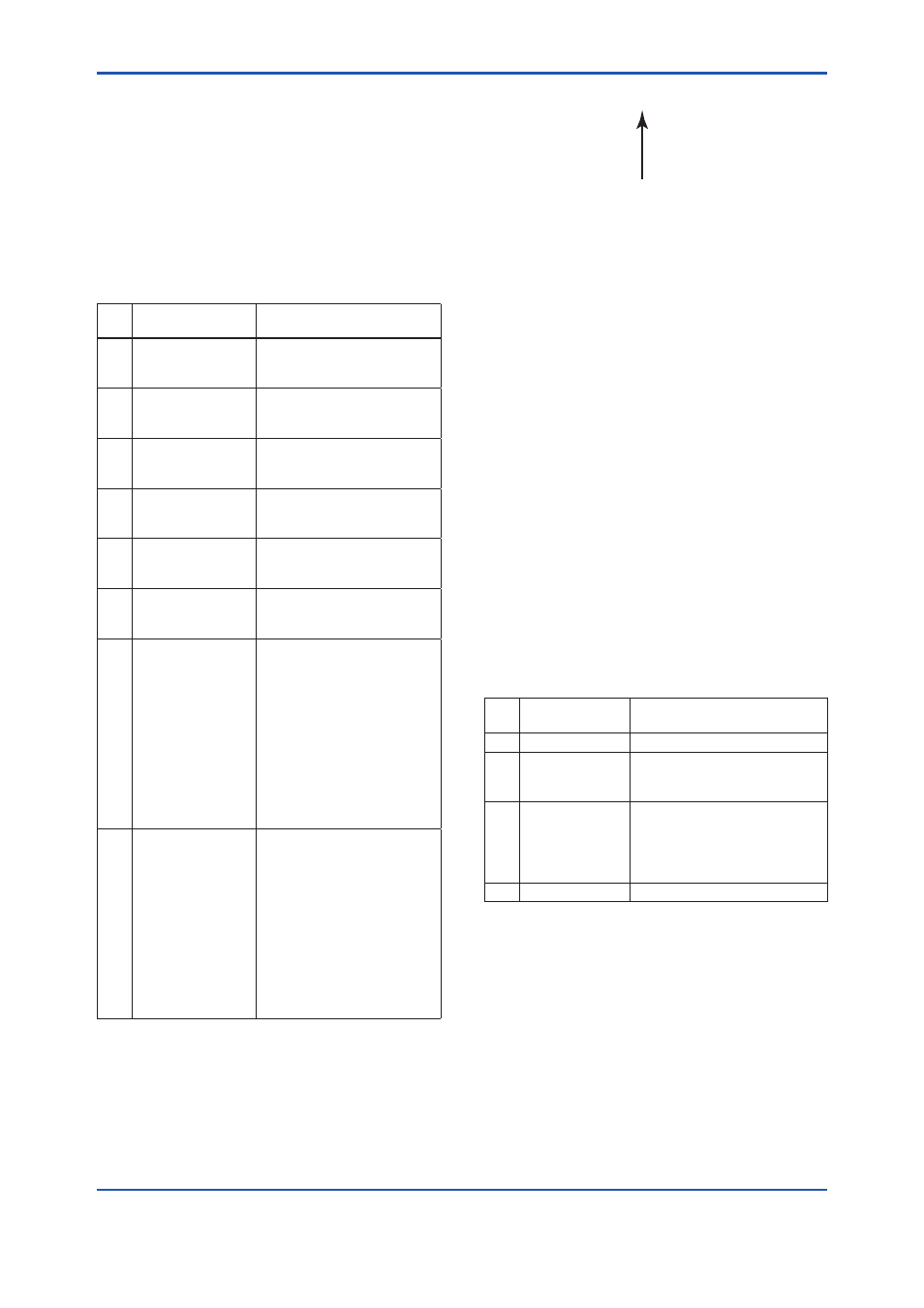
13.6 Mode Shedding upon
Computer Failure
When the data status of RCAS_IN falls to Bad
while the block in question is running in RCas
(remote cascade) mode, mode shedding occurs in
accordance with the setting in SHED_OPT. Table
13.3 shows the available selections for SHED_OPT
setting for the AO block.
Table 13.3
SHED_OPT of AO Block
bit Available Setting
for SHED_OPT
Actions upon Computer
Failure
1 Normal shed,
normal return
Sets MODE_BLK.actual to
Cas*
1
, and leaves MODE_
BLK.target unchanged.
2 Normal shed, no
return
Sets both MODE_BLK.actual
and MODE_BLK.target to
Cas*
1
.
3 Shed to Auto,
normal return
Sets MODE_BLK.actual to
Auto*
2
, and leaves MODE_
BLK.target unchanged.
4 Shed to Auto, no
return
Sets both MODE_BLK.actual
and MODE_BLK.target to
Auto*
2
.
5 Shed to Manual,
normal return
Sets MODE_BLK.actual to
Man, and leaves MODE_
BLK.target unchanged.
6 Shed to Manual,
no return
Sets both MODE_BLK.actual
and MODE_BLK.target to
Man.
7 Shed to retained
target, Normal
return
If Cas is set in MODE_BLK.
target,
- sets MODE_BLK.actual to
Cas and
- leaves MODE_BLK.target
unchanged.
If Cas is not set in MODE_
BLK.target,
- sets MODE_BLK.actual to
Auto*
2
and
- leaves MODE_BLK.target
unchanged.
8 Shed to retained
target, No return
If Cas is set in MODE_BLK.
target, sets:
- MODE_BLK.actual to
Cas, and
- MODE_BLK.target to
Cas, too.
If Cas is not set in MODE_
BLK.target, sets:
- MODE_BLK.actual to
Auto*
2
, and
- MODE_BLK.target to
Cas.
*1:
The modes to which the AO block can transfer are limited
to those set in MODE_BLK.permitted, and the priority
levels of modes are as shown below. In fact, if Normal
shed, normal return is set for SHED_OPT, the detection of
a computer failure causes MODE_BLK.actual to change
to Cas, Auto, or Man, whichever is set in MODE_BLK.
permitted and has the lowest priority level.
Man
Auto
Cas
RCas
ROut
Higher priority level
Lower priority level
*2:
Only when Auto is set as permitted mode.
NOTE: If a control block is connected as a cascade
primary block of the AO block, a mode transition of the
AO block to Cas occurs in the following sequence due to
initialization of the cascade connection: RCas → Auto →
Cas.
13.7 Initialization at Start
To prevent a sudden change in output when the AO
block carries out the specified actions for the first
time after the power is turned on, it:
1) Equalizes SP to PV if the Faultstate Type option
(bit no. 7) in IO_OPTS is false.
2) Equalizes OUT to READBACK.
If the Faultstate Type option (bit no. 7) in IO_OPTS
is true, it restores FSTATE_VAL in SP.
13.8 Alarm Processing
When a condition shown in the table below is met,
the AO block changes the bit statuses of BLOCK_
ERROR accordingly and generates a block alarm.
Table 13.4
BLOCK_ERROR in AO Block
Bit Name of Error
Represented
Condition
3 Simulate Active SIMULATE is active.
4 Local Override
Fault state is on, and
Propagate Fault Backward is
false.
7 Input Failure /
process variable
has BAD status
Propagate Fault Backward in
STATUS_OPTS is false, and
the sub-status component of
the status of READBACK is
sensor failure or device failure.
15 Out-of-Service
The target mode is O/S.