5 travel calibration, 6 online diagnostics, 1 xd_error – Yokogawa YVP110 User Manual
Page 73: Travel calibration -4, Online diagnostics -4 12.6.1, Xd_error -4, 5 travel calibration caution
<12. Transducer Block>
12-4
IM 21B04C01-01E
12.5 Travel Calibration
CAUTION
This function strokes the valve over its full range.
Do not execute while valve is controlling the
process. Keep away from the movable parts to
avoid injury.
Calibrate the travel of the valve stem, i.e., the stroke
of the valve, as follows. First, set the valve stem
to the desired position by changing the value of
FINAL_VALUE.value. Next, write the value from
the following choices according to your purpose
of calibration. At this time, the AO block and the
transducer block need to be in the O/S mode.
1 = off
2 = 0% point calibration (calibrates only the
0% point and shifts the 100% point by the
resulting amount of the change in 0% point
while leaving the span unchanged).
3 = span calibration (calibrates only the 100%
point while leaving the 0% point unchanged).
4 = 50% point calibration (calibrates at the 50%
point while leaving the 0% point and 100%
point unchanged).
The 50%-point calibration (in other words, linearity
calibration) is intended to minimize the linearity
error at the 50% point. Also, if the feedback lever
is slightly deviates from a horizontal level due to
careless installation of the YVP110 positioner, an
error caused by this shift can be corrected by the
50%-point calibration. Note that carrying out travel
calibration of Index 2 or 3 clears the 50% calibration
result. If you want to carry out the 50%-point
calibration, do it after other tuning has finished.
The result of Travel calibration, which is written to
TRAVEL_CALIB_RESULT as shown in Table 12.3,
may be an error or warning. An error invalidates the
tuning and does not update the parameter settings.
12.6 Online Diagnostics
The YVP110 features functions to diagnose the
YVP110 itself and valve actions during online. The
following describes the self-diagnostics function
related to the transducer block.
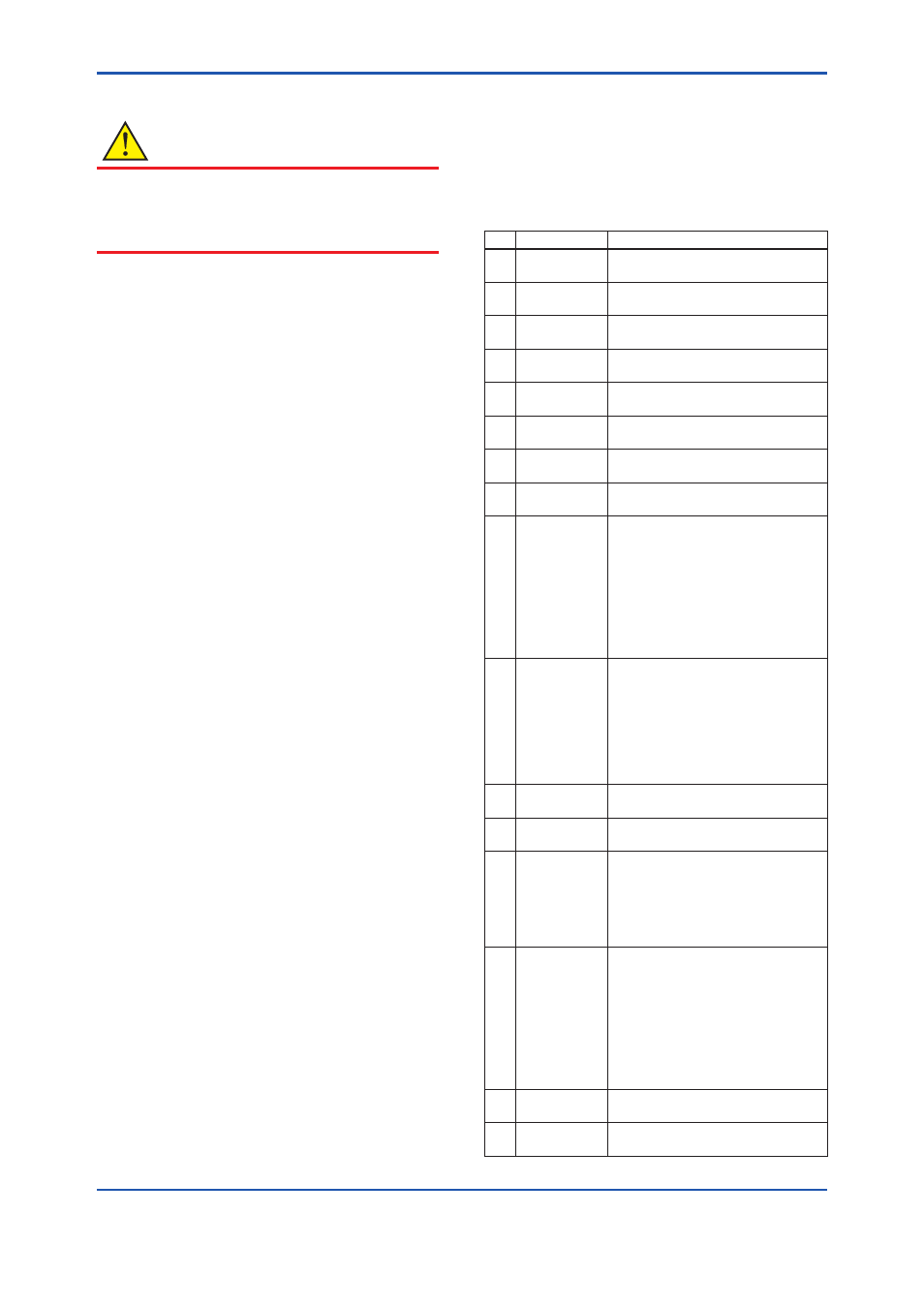
12.6.1 XD_ERROR
The transducer block performs self-diagnostics and
writes the results to the parameter XD_ERROR.
Table 12.4 shows the meanings of these results in
XD_ERROR.
When the content of XD_ERROR or BLOCK_ERR
becomes a nonzero value, an alarm is output to the
parameter BLOCK_ALM.
Table 12.4
XD_ERROR
value
Message
Description
100 Cycle count limit
exceed
TOTAL_CYCLE_COUNT has reached
CYCLE_COUNT_LIM.
101 Travel limit
exceed
TOTAL_TRAVEL has reached TRAVEL_
LIM.
102 Total open limit
exceed
TOTAL_OPEN_TIME has reached
OPEN_TIME_LIM.
103 Total close limit
exceed
TOTAL_CLOSE_TIME has reached
CLOSE_TIME_LIM.
104 Total near close
limit exceed
TOTAL_NEAR_CLOSE_TIM has
reached NEAR_CLOSE_TIME_LIM.
110 Temperature out
of range
The measured temperature is out of
range.
111 Pressure sensor
out of range
The measured pressure is out of range.
112 Position sensor
out of range
The measured valve position is out of
range.
113 Deviation
warning
The deviation between the setpoint and
measured valve position has exceeded
DEVIATION_LIM continuously for the
period specified by DEVIATION_TIME_
TH [1].
This is not applicable for tight-shut or
full-open actions, or when the period
specified by DEVIATION_TIME_TH [1]
is less than 0.
114 Servo output
drift warning
SERVO_OUTPUT_SIGNAL has
reached SERVO_WARN_LO_LIM
or SERVO_WARN_HI_LIM and has
continued in excess of SERVO_TIME_
TH. This is not applicable for tight-shut
or full-open actions, or when the period
specified by SERVO_TIME_TH is less
than 0.
120 Temperature
sensor failure
Temperature sensor failed
121 Pressure sensor
failure
Pressure sensor failed
122 Severe servo
output drift
SERVO_OUTPUT_SIGNAL has
reached 10% or 90%, and has continued
in excess of SERVO_TIME_TH. This is
not applicable for tight-shut or full-open
actions, or when the period specified by
SERVO_TIME_TH is less than 0.
123 Deviation error The deviation between the setpoint and
measured valve position has exceeded
DEVIATION_LIM continuously for the
period specified by DEVIATION_TIME_
TH [2].
This is not applicable for tight-shut or
full-open actions, or when the period
specified by DEVIATION_TIME_TH [2]
is less than 0.
124 Position sensor
failure
Position sensor failed
125 A/D converter
failure
A/D converter failed