A-39 – Yokogawa YVP110 User Manual
Page 150
A-39
IM 21B04C01-01E
(3) Improving the response time
• If you input a value in a small step of 5% or less
and response is slow, increment the value for
SERVO_GAIN by 30.
• If necessary, increment or decrement the value
for BOOST_VALUE [1] [2] and X_BOOST_
VALUE [1] [2] by 1, respectively.
(4) Checking hunting operation
Input a value in a large step of approx. 80% to
ensure the hunting operation does not occur. If the
hunting operation does occur, decrease the value
for SERVO_GAIN to 2/3 or 1/2 of the originally
entered value.
(5) After tuning the control parameters,
re-check each parameter if necessary.
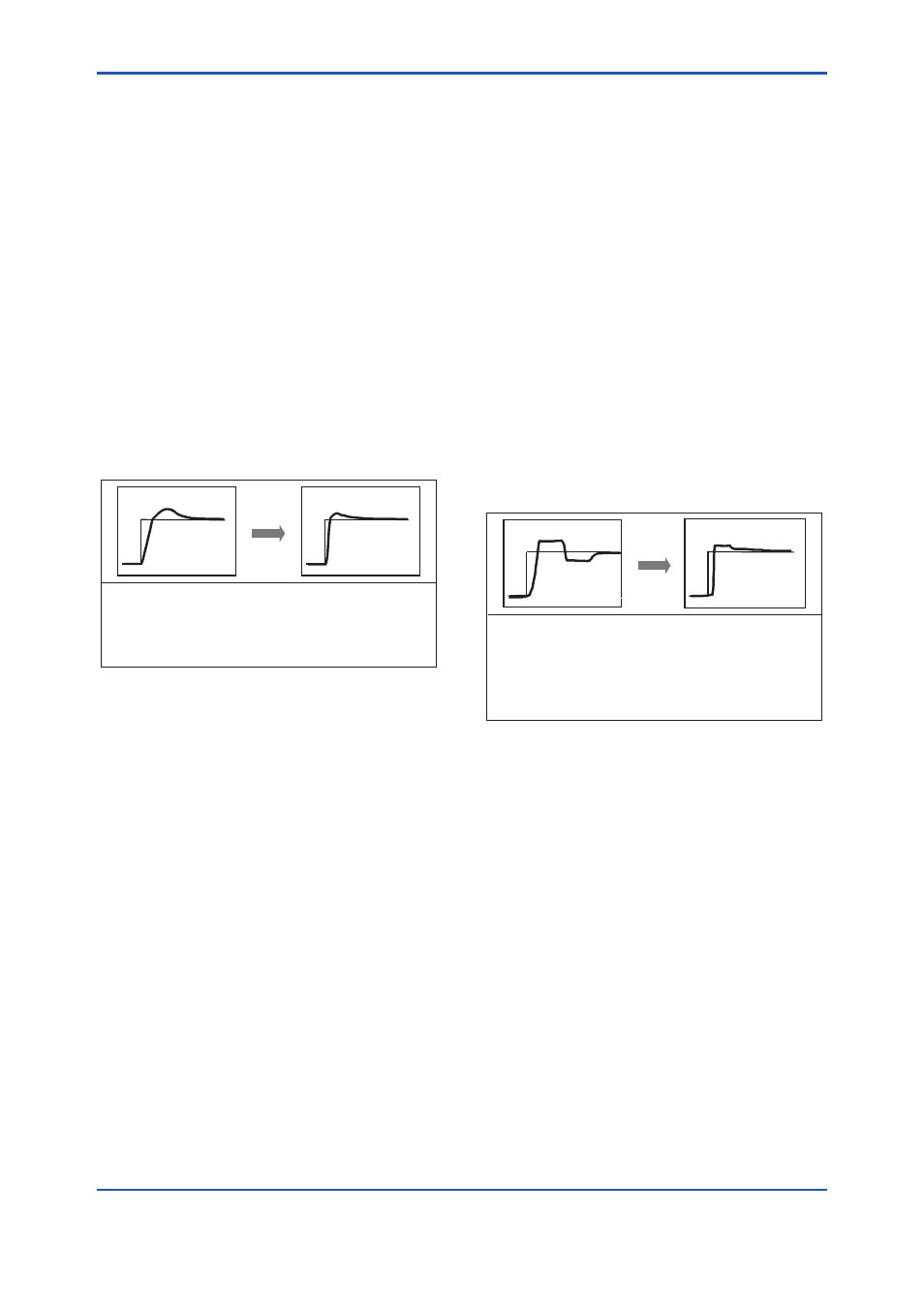
[2] Moderate response
[Characteristics]
The curve stabilizes slowly after an overshoot. If gain is
increased, the overall response can be improved.
This waveform is typically observed in middle and large
capacity actuators.
FA0603.ai
(1) Improving the stabilization time
Decrease the value for SERVO_RESET to improve
the capability of tracking the target value. Verify the
10% step response and decrement the value by 3.
(2) Modifying overshoot
• Increment the value for SERVO_GAIN. Verify
the 10% step response and increment the value
by 1.5 times.
• If you input a value in a small step of approx.
5% or less, and you cannot obtain a significant
improvement effect compared to the 10% step,
increment the value for SERVO_RATE by 0.2 to
reduce an excessively rapid response.
• The same boost value is set on both the air
delivery and exhaust sides using Auto Tuning. If
the overshoot on the exhaust side is larger than
that on the air delivery side for a double-acting
model, input a negative value in X_BOOST_
VALUE [1] [2], without changing the value of
0 in X_BST_ON_THRESHOLD [1] [2] and
X_BST_OFF_THRESHOLD [1] [2]. First, try to
input a negative value of half that of BOOST_
VALUE [1] [2], and if necessary,
increment or decrement the value by 1.
(3) Improving the response time
• If you input a value in a small step of 5% or
less and the response is slow, increment or
decrement the value for BOOST_VALUE
[1] [2] and X_BOOST_VALUE [1] [2] by 1,
respectively.
• If necessary, increment the value for SERVO_
GAIN by 30.
(4) Checking hunting operation
Input a value in a large step of approx. 80% to
ensure the hunting operation does not occur. If the
hunting operation does occur, decrease the value
for SERVO_GAIN to 2/3 or 1/2 of the originally
entered value.
[3] Moderate response with a flat overshoot
[Characteristics]
Response is slow and a flat-headed overshoot occurs.
Auto Tuning may fail, or hunting or limit cycle may occur
after Auto Tuning.
This waveform is typically observed if the friction of a valve
or actuator is large.
FA0604.ai
(1) In the case of the occurrence of a limit cycle
• If you increase the value for SERVO_RESET,
response slows down and a limit cycle can be
prevented. Verify a large step response of 30%
or more and increment the value by 5.
• If necessary, decrease the value for SERVO_
GAIN to 2/3 or 1/2 of the originally entered
value.
• If necessary, set the SERVO_DEADBAND. Set
a value in approximately the range of a limit
cycle (recommended upper limit is 2%).
• If the limit cycle is not eliminated, check the
piping and feedback lever installation by
referring to Section 20.4.
(2) Modifying overshoot
• Increase the value for SERVO_RATE to reduce
an excessively rapid response. Verify the 10%
step response and increment the value by 0.2.