Ao function block, 1 general, 2 modes – Yokogawa YVP110 User Manual
Page 75: 3 forward path, 1 fault state, Ao function block -1, General -1, Modes -1, Forward path -1 13.3.1, Fault state -1
<13. AO Function Block>
13-1
IM 21B04C01-01E
13. AO Function Block
13.1 General
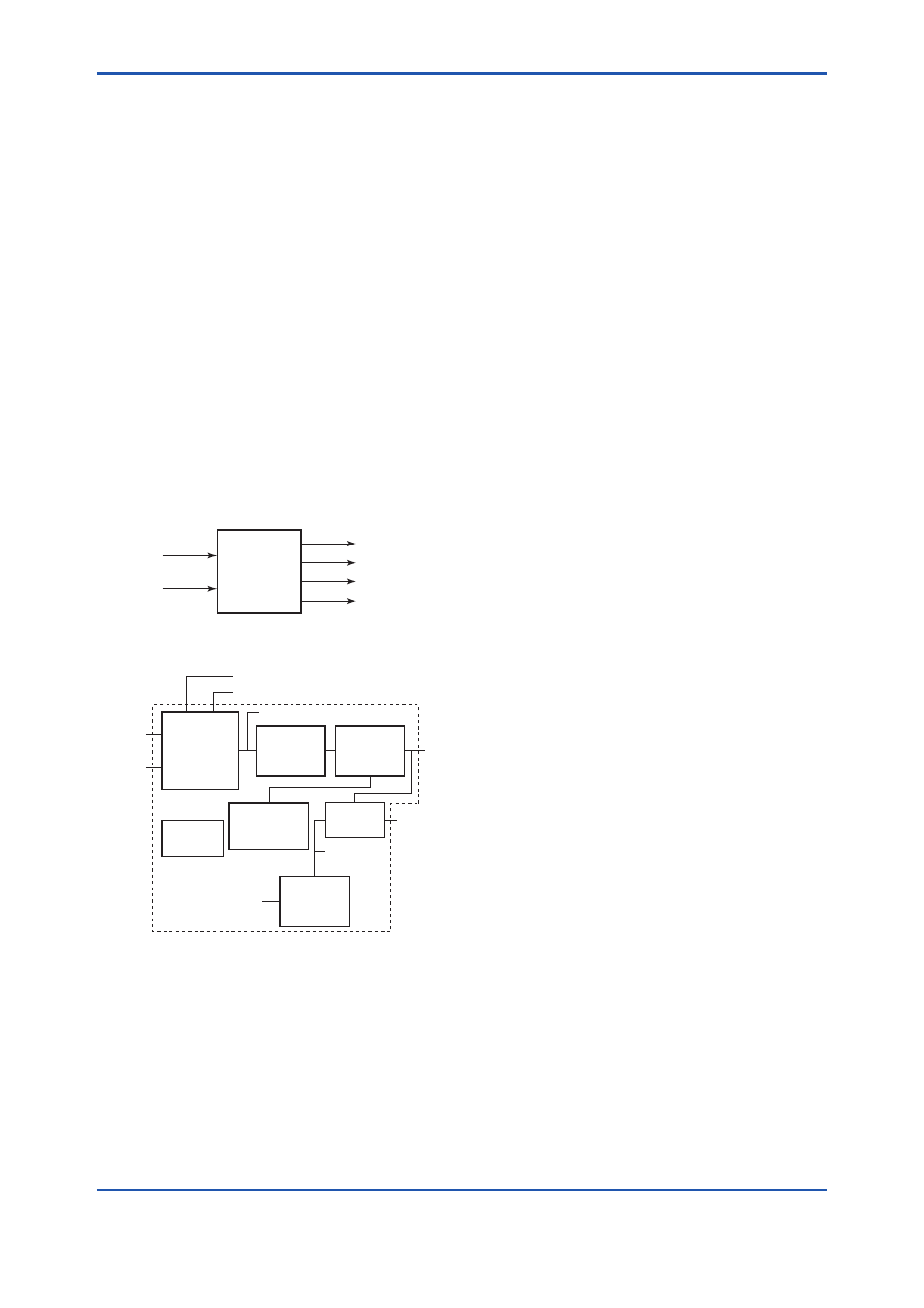
The AO function block receives the control signal
from the transducer block and outputs it to the
actuator. The major functions of the AO function
block include:
• Scaling
• Setpoint limiters - for both the value and rate of
change
• Simulation
• Valve position feedback
• Actions upon abnormality of upstream block
• Signal inversion
The AO function block performs bi-directional signal
handling: transfer of the valve control signal to the
transducer block (forward path) and feedback of the
valve position signal from the transducer block to
the upstream block (backward path).
F1301.ai
AO
Transducer
RCAS_OUT
RCAS_IN
CAS_IN
BKCAL_OUT
OUT
Figure 13.1 Inputs/Outputs of AO Function Block
F1302.ai
Setpoint
SP_RATE_DN
SP_RATE_UP
SP_HI_LIM
SP_LO_LIM
Out Convert
PV_SCALE
XD_SCALE
Output
PV Convert
XD_SCALE
PV_SCALE
Fault State
FSTATE_TIME
FSTATE_VAL
Simulate
SIMULATE
MODE
SHED_OPT
RCAS_IN
PV
CAS_IN
OUT
CHANNEL
SP
RCAS_OUT
BKCAL_OUT
READBACK
Figure 13.2 Function Diagram of AO Function
Block
13.2 Modes
The target mode for the AO function block can be
set from five block modes: RCas, Cas, Auto, Man,
and O/S. Regardless of the target mode, the AO
block automatically enters the IMan or LO mode
when a specified condition is met (such as when
another function block enters a specific status)
depending on the parameter settings.
13.3 Forward Path
The following describes the signal input from the
upstream block to the AO block and then passed
to the transducer block. The upstream block is
typically the PID controller block, and the control
signal from the PID block is input as the source of
computing the setpoint SP for the AO block.
The path for computing the SP differs depending
on the mode. In Cas mode, CAS_IN is used for
SP. In RCas mode, RCAS_IN is used for SP. If the
value of CAS_IN or RCAS_IN, whichever is used,
is greater than SP_HI_LIM (high limit) or less than
SP_LO_LIM (low limit), the internal SP is set to the
respective limits. Also, if the rate of change in the
value of CAS_IN or RCAS_IN, whichever is used,
is greater than SP_RATE_UP (rate-of-increase
limit) in the increasing direction, or than SP_RATE_
DN (rate-of-decrease limit) in the decreasing
direction, the change in internal SP is limited by the
corresponding rate-of-change limit setting.
In RCas, Cas or Auto mode, the SP value is used
for the AO block’s output OUT, whose value is then
passed to the transducer block via channel 1.
13.3.1 Fault state
As for Fieldbus-enabled positioners including the
YVP110, not only a power failure but also other
errors (such as a communication error) can cause
the fail-safe action. For example, when the status
of the CAS_IN input of the AO block from its
upstream block indicates a specific status, such as
a communication error, the case is regarded as an
abnormality and fault state actions including a mode
change are enacted.