A6.4 description of control parameters, A6.4, A-41 – Yokogawa YVP110 User Manual
Page 152
A-41
IM 21B04C01-01E
A6.4 Description of Control
Parameters
The YVP110's basic method of controlling the valve
position is PI-D control. This control is characterized
by the fact that a rapid output change is prevented
by the derivative term of D being added to the
feedback.
In addition, YVP110 has a boost function that
serves as an output acceleration function after
an input change, because it compensates the
nonlinearity caused by the structure of a valve or
YVP.
When you set these parameters, change the mode
of the transducer block and AO function block to
O/S.
SERVO_GAIN
Tuning range: 0.1 to 1300 (Default: 120)
Set the loop gain of PI-D control.
The proportional gain of PI-D control increases in
proportion to (SERVO_GAIN / INTERNAL_GAIN).
If you increase the value for SERVO_GAIN,
tracking capability tends to increase, whereas
control stability tends to decrease.
SERVO_RESET
Tuning range: 0, 2 to 50 sec (Default: 15 sec)
Set the integral time of PI-D control.
The pace of change in integral volume quickens
in reverse proportion to the integral time and the
volume changes repeatedly until the deviation
disappears.
If you set a smaller value for the integral time, the
deviation disappears more quickly, whereas fast
accumulation of integral components may cause an
overshoot.
If you set a larger value for the integral time, you
can reduce the accumulation of excessive integral
components when the deviation is large, but it takes
longer for the deviation to disappear.
If 0 is set, this function is invalid.
SERVO_RATE
Tuning range: 0, 0.05 to 1.0 sec (Default: 0.22
sec)
Set the derivative time of PI-D control.
The derivative term relates to the feedback and
prevents a rapid output change, and the preventive
effect increases in proportion to the derivative time.
If a rapid response causes an overshoot, set a
larger value for the derivative time to prevent a rapid
change and reduce overshoot.
However, if the effect of this change is excessive,
tracking capability during step response decreases.
If 0 is set, this function is invalid.
SERVO_RATE_GAIN
Tuning range: 2 to 20 (Default: 5)
Set the gain in the derivative term of PI-D control.
As with SERVO_RATE, this parameter relates to
the derivative term of control, and the preventive
effect increases in proportion to an increase in the
gain in the derivative term.
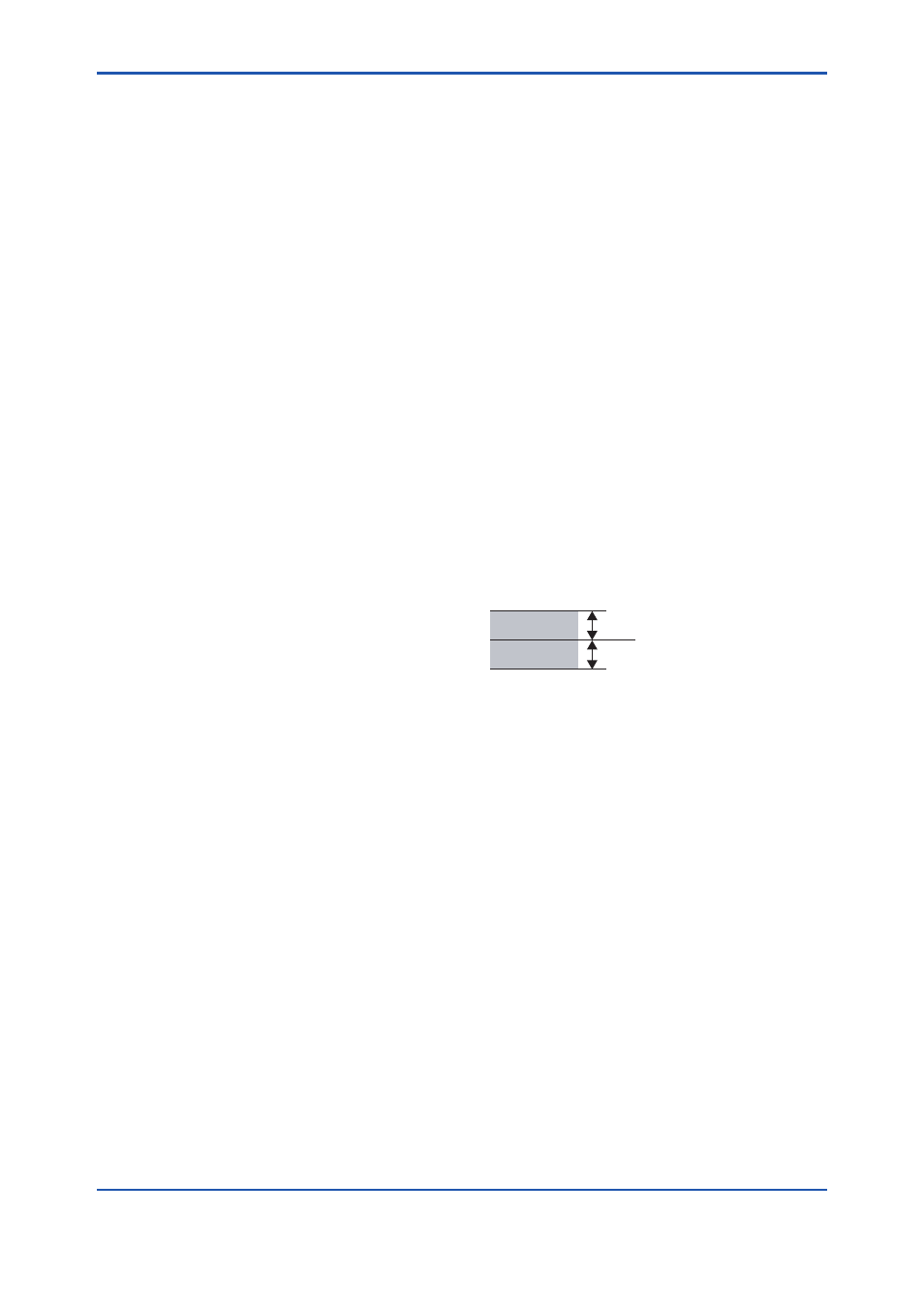
SERVO_DEADBAND
Tuning range: 0 to 50% (Default: 0%)
Setting this parameter stops an integral operation in
the vicinity of the Set point.
Integration
stop area
Integration
stop area
SERVO_DEADBAND
SERVO_DEADBAND
Set point
FA0605.ai
The range of SERVO_DEADBAND in relation to
the set point is a dead band, in the area of which the
integral operation stops.
If you set the parameter SERVO_DEADBAND
when, for example, the friction of a valve is large, a
limit cycle can be prevented. However, the value of
the steady-state deviation could be as large as that
of SERVO_DEADBAND.
SERVO_OFFSET
Tuning range: 0 to 100% of MV (Default: 55%)
Set the initial value for the electric current that is
output from the CPU to the I/P module after the
power is turned on. The value simultaneously
serves as the base point for an integration
operation.
The unit of this parameter is % of the current output
to the I/P module.
The value is usually determined by Auto Tuning, so
you do not need to change the value.