2 alarm generation, Alarm generation -2 – Yokogawa YVP110 User Manual
Page 64
<10. Actions of YVP110 During Operation>
10-2
IM 21B04C01-01E
RCas mode
Means Remote Cascade mode. In RCas
mode, the function block performs the specified
calculations based on the setpoint that is input from
host computer or others via the remote cascade
parameter, and outputs the result.
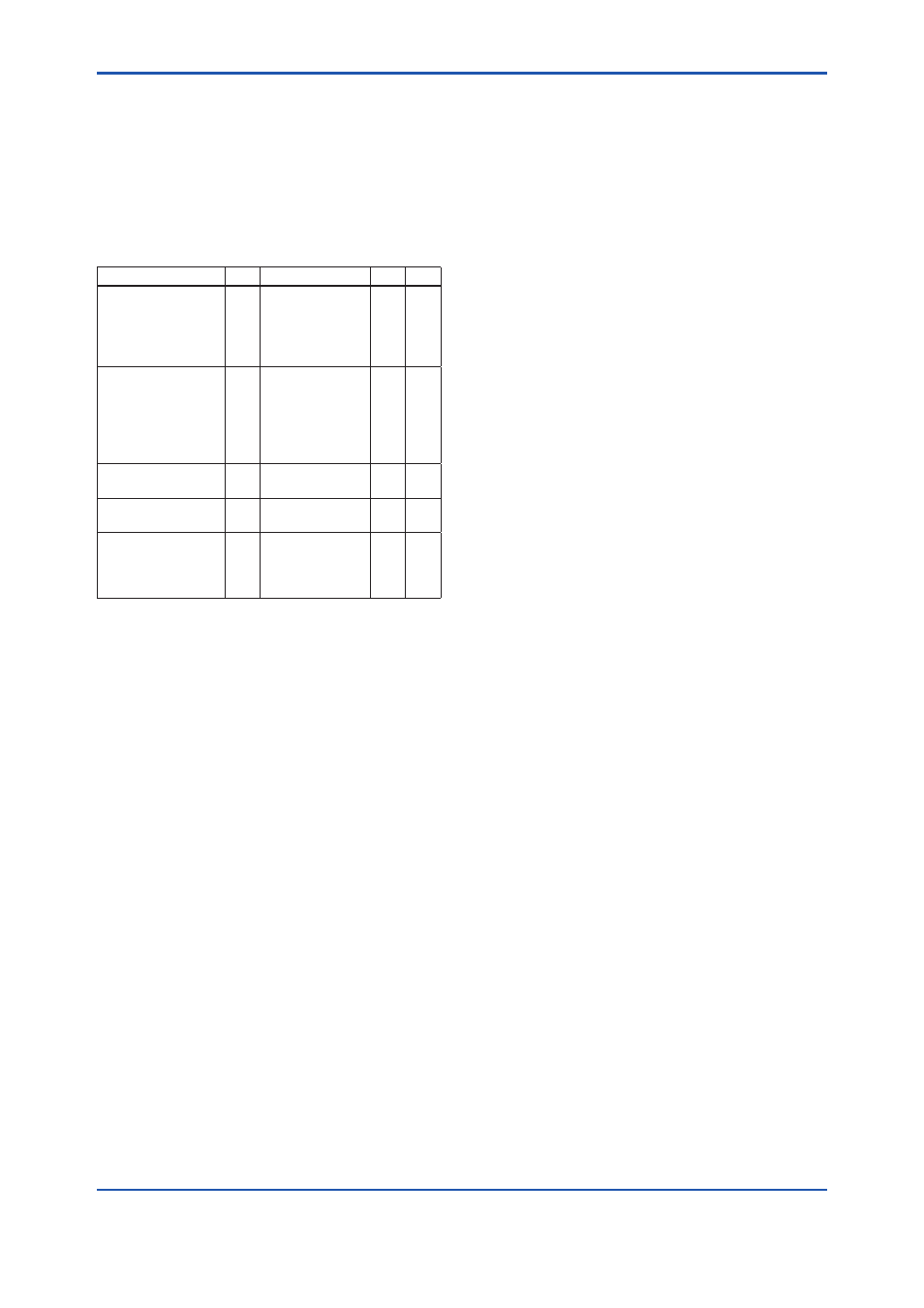
Table 10.2
Examples of Block Mode Combinations
and Operation Statuses
Operation Statuses AI
PID
AO TB
Transducer Initial
setup, valve setup
(when carrying out
auto tuning, travel
calibration, etc.)
—
—
O/S O/S
Modification of
parameter settings
in transducer block
(modification of
control parameter
settings, etc.)
—
—
O/S O/S
Constant valve
position control
—
—
Auto Auto
PID single-loop
control
Auto
Auto
Cas Auto
PID cascade-loop
control
Auto Primary PID:
Auto
Secondary PID:
Cas
Cas Auto
Table 10.2 shows examples of block mode
combinations in a YVP110 (however, it does not
show all patterns). When a block changes mode
or the data status of a signal changes for some
reason, the other blocks connected to that block
identify the change by detecting the change in
status of an input signal, and change their modes,
too. For example, when the data status of BKCAL_
IN in a PID block changes to bad, the PID block
automatically change mode to IMan to initialize the
control of its downstream block.
The respective modes to which each block should
enter upon occurrence of a communication error
and at a restart, and the handling of signals in
each mode may be defined in the block’s option
parameters such as IO_OPTS and STATUS_
OPTS. For details, see the detailed descriptions of
each function block.
10.2 Alarm Generation
When the YVP110 detects an abnormality in the
device itself by the self-diagnostic function, a device
alarm is issued from the resource or transducer
block. An abnormality in a function block or in a
process value is issued from the corresponding
block as a block error or process alarm.
A YVP110 can report the following alarms and
events.
Analog alerts: A type of alarm generated when
a process value or a deviation value exceeds a
specified limit in the following blocks:
PID block : HI, HI_HI, LO, LO_LO, DV_HI, DV_LO
Discrete alerts: A type of alarm generated when
an abnormal status is detected. For the resource
block, a discrete alert is generated as a block alarm
or write-error alarm. For the DI block, a discrete
alert is generated as a block alarm or DISC alarm.
For the Transducer block, AO, OS, IS, AR block and
PID block, a discrete alert is only generated as a
block alarm.
Update alerts: Generated whenever a change is
made to the settings of the certain parameters.
Table 10.3 shows the elements composing an alert
object.