A-43 – Yokogawa YVP110 User Manual
Page 154
A-43
IM 21B04C01-01E
If the hysteresis of a valve is large, the valve may
not react for a while after an input change, and
a delay in response may occur. This delay in
response is accompanied by a large deviation, and
the accumulation of excessive integral components
can cause an overshoot. This parameter is effective
in cases such as this.
If the deviation from the set point value exceeds the
SERVO_DEADBAND, this function starts. If 0 is set
to SERVO_DEADBAND, this function is invalid.
FA0608.ai
Set point
SERVO_DEADBAND
SERVO_DEADBAND
SERVO_I_SLEEP_LMT
Integral area
SERVO_P_ALPHA
Tuning range: 0 to 100% (Default: 0%)
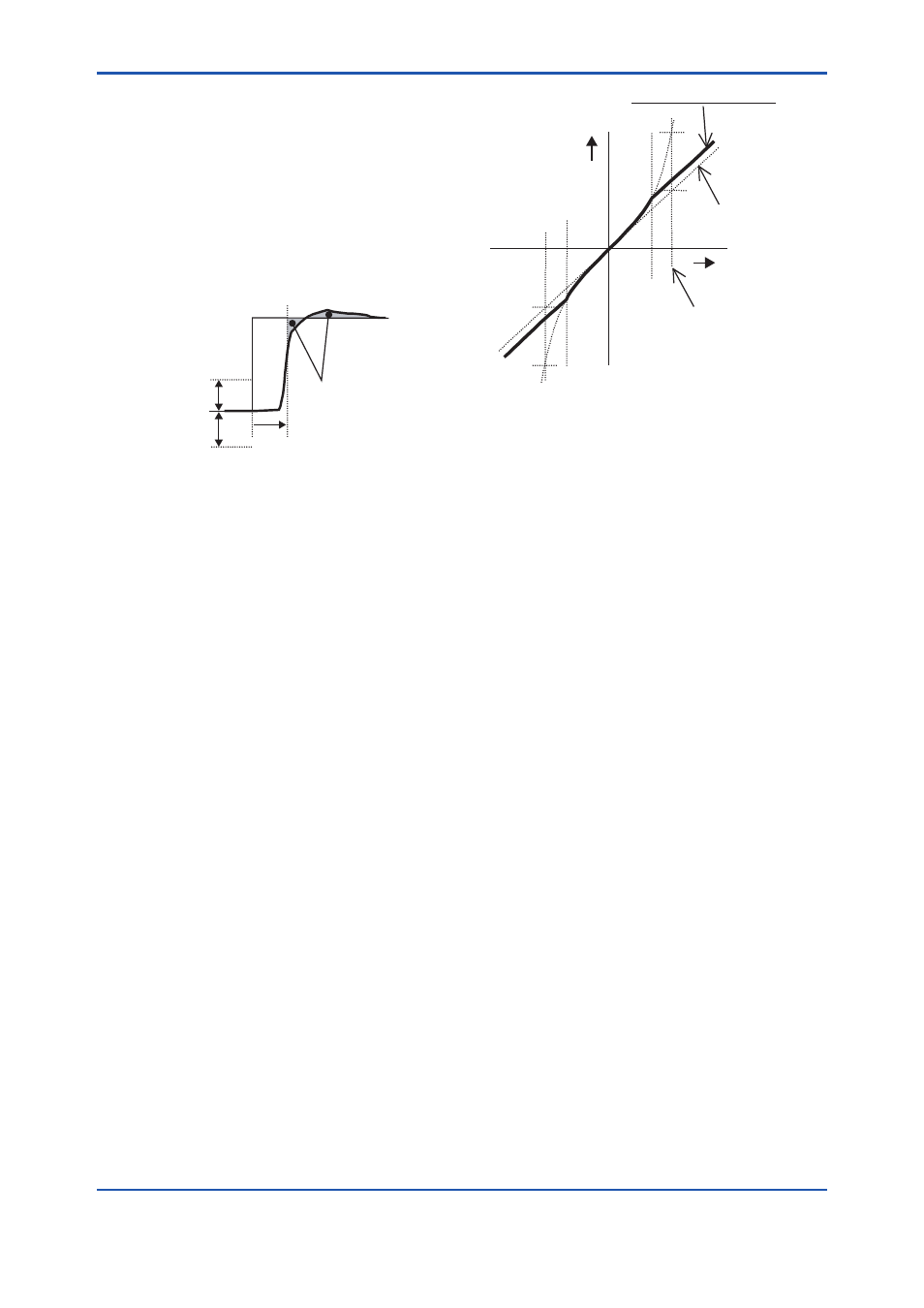
Setting this parameter adds more values to the
proportional term for a large step compared to a
small step. Use this parameter when a large value
cannot be set to the proportional gain because of
the large hysteresis of a value, and the response
speed for a large step is insufficient.
A usual operation in the proportional term covers
the deviation only; however, unless 0 is set for
this parameter, a value calculated based on the
following equation is added, in addition to the
deviation. If 0 is set, this function is invalid.
(Value added to the proportional term) = deviation ×
|deviation| / SERVO_P_ALPHA
You can obtain a quadratic curve in which the
proportional term doubles when the deviation
equals the SERVO_P_ALPHA, and the added
value is in reverse proportion to an increase in the
value of SERVO_P_ALPHA.
FA0609.ai
Proportional value
Proportional + added values
Proportional value
Deviation %
10%
SERVO_P_ALPHA %
You can obtain an effect to increase the apparent
gain for a large step without changing the response
characteristics for a small step.
However, as long as the deviation is more than
10%, the added value is fixed to a value calculated
when the deviation is 10%
INTERNAL_GAIN
Tuning range: 0.5 to 50 rad/mA (Default: 5
rad/mA)
INTERNAL_GAIN is the total gain of the I/P
module, the control relay, the valve, the actuator,
and the feedback lever.
INTERNAL_GAIN is part of the loop gain of PI-D
control.
This value is usually determined by auto tuning and
travel calibration, so you do not need to change the
value.