IAI America PCON-CFA User Manual
Page 26
3.
ACON-C/CG, PCON-C/CG
CC-Link
20
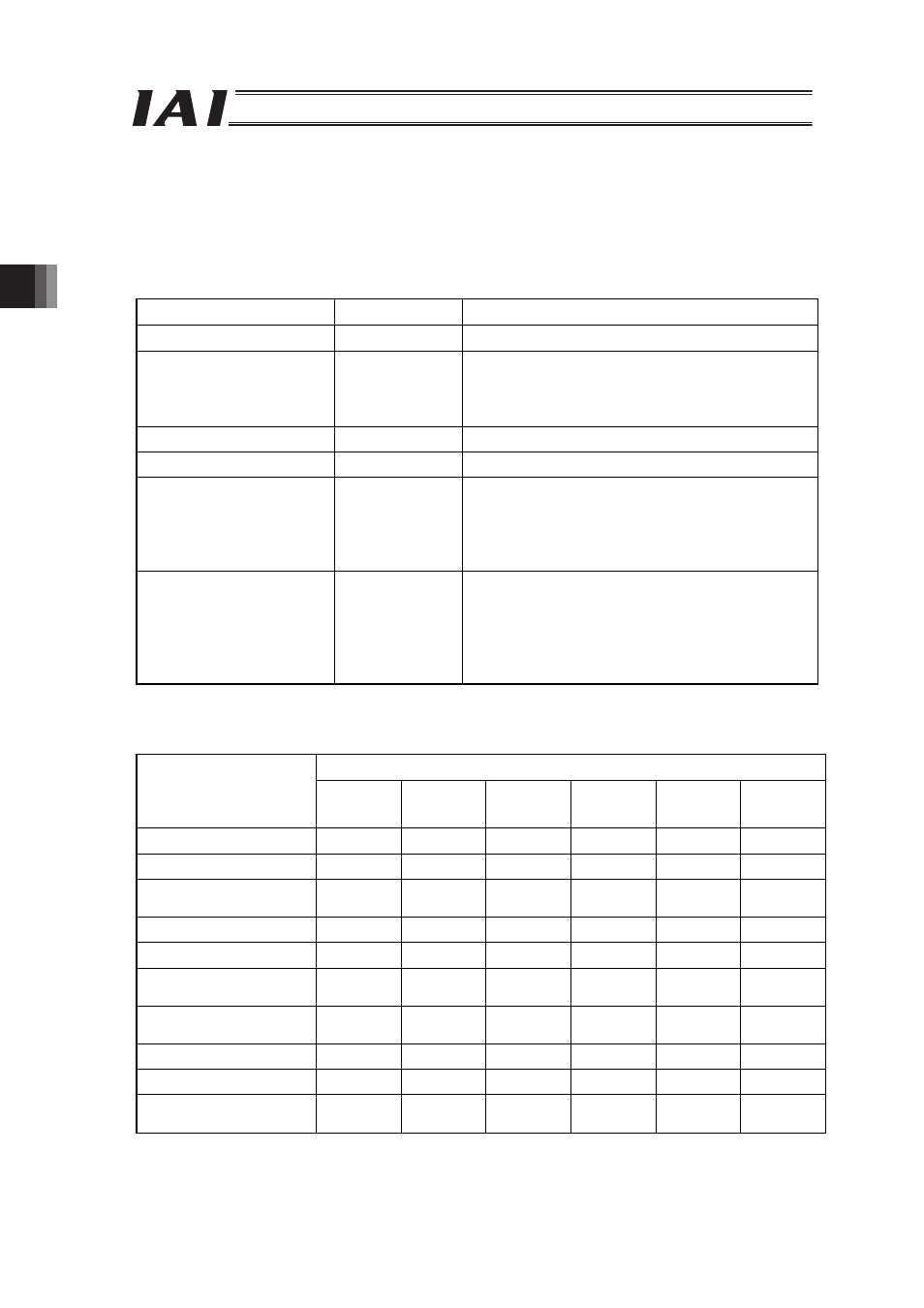
3.7.2 Remote I/O Mode (Remote Device Station: No. of Occupied Stations: One Station)
This is the operation mode with the position No. set up as the same as using PIO (24V I/O). Set the position
data using the RC personal computer application software or teaching pendant. The number of operable
positions varies depending on the parameter No. 25 “PIO Pattern” setting.
The I/O specifications for the PIO pattern are described as follows (Refer to instruction manual for the
controller main body for more information).
Parameter No. 25 Set Value
Operation Mode
I/O Specifications
0
Positioning mode 64 positioning points and 2 zone output points
1
Teaching mode
64 positioning points and 1 zone output point
The positioning and jog operations are available.
The current position can be written on the setup position
data.
2
256 point mode
256 positioning points and 1 zone output point
3
512 point mode
512 positioning points and no zone output point
4
Electromagnetic
valve mode 1
7 positioning points and 2 zone output points
The direct operation command is available for each
position No.
The positioning completion signal is output for each
position No.
5
Electromagnetic
valve mode 2
3 positioning points and 2 zone output points
It is operated with the Forward/Backward/Intermediate
Position Commands.
The positioning completion signal is output individually
for each Forward End/Backward End/Intermediate
Positions.
The robot cylinder's effective main functions that can be controlled using this mode, are as shown in the
following table.
PIO Pattern
Robot Cylinder Function 0:
Positioning
mode
1:
Teaching
mode
2:
256 point
mode
3:
512 point
mode
4:
Electromagnetic
valve mode 1
5:
Electromagnetic
valve mode 2
Homing
䂾
䂾
䂾
䂾
䂾
㬍
Positioning
䂾
䂾
䂾
䂾
䂾
䂾
Speed, Acceleration and
Deceleration Settings
䂾
䂾
䂾
䂾
䂾
䂾
Pitch Feeding (Inching)
䂾
䂾
䂾
䂾
䂾
䂾
Pressing Operation
䂾
䂾
䂾
䂾
䂾
㬍
Speed change during the
movement
䂾
䂾
䂾
䂾
䂾
䂾
Different Acceleration Speed
Operation in Deceleration
䂾
䂾
䂾
䂾
䂾
䂾
Pause
䂾
䂾
䂾
䂾
䂾
䂾
(*1)
Zone Signal Output
䂾
䂾
䂾
㬍
䂾
䂾
PIO Pattern Selection
(Set using the parameters)
䂾
䂾
䂾
䂾
䂾
䂾
O: Operation Available X: Operation Unavailable
(*1) It is available when the parameter No. 27 “Movement Command Type” is set to “0”. Turning “OFF” the
“Movement Command” can stop the system temporarily.