IAI America PCON-CFA User Manual
Page 201
5. SCON-CA
CC-Link
195
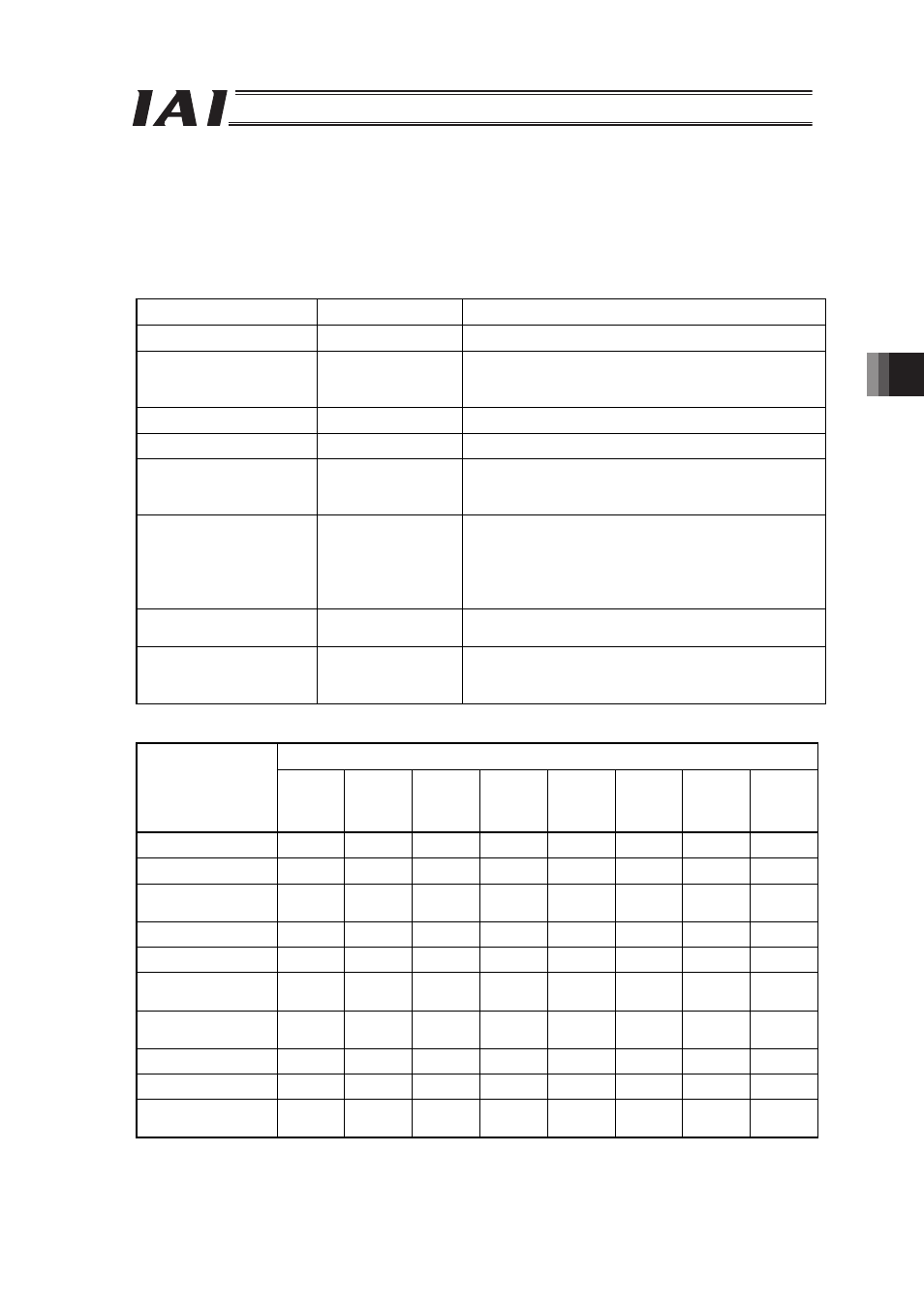
5.7.6 Remote I/O Mode 2 (Remote Device Station: No. of Occupied Stations: One Station)
This is the operation mode with the position No. set up as the same as using PIO (24V I/O). Set the position
data using the teaching tool such as the personal computer application software for RC. The number of
operable positions varies depending on the parameter No. 25 “PIO Pattern” setting.
The I/O specifications for the PIO pattern are described as follows (Refer to instruction manual for the
controller main body for more information).
Parameter No. 25 Set Value
Operation Mode
I/O Specifications
0
Positioning mode
64 positioning points and 2 zone output points
1
Teaching mode
64 positioning points and 1 zone output point
The positioning and jog operations are available.
The current position can be written on the setup position data.
2
256 point mode
256 positioning points and 1 zone output point
3
512 point mode
512 positioning points and no zone output point
4
Electromagnetic
valve mode 1
7 positioning points and 2 zone output points
The direct operation command is available for each position No.
The positioning completion signal is output for each position No.
5
Electromagnetic
valve mode 2
3 positioning points and 2 zone output points
It is operated with the Forward/Backward/Intermediate
Position Commands.
The positioning completion signal is output individually for
each Forward End/Backward End/Intermediate Positions.
6
Force Control Mode 1
(requires dedicated loadcell)
32 positioning points and 1 zone output points
7
Force Control Mode 2
(requires dedicated loadcell)
5 positioning points and 1 zone output points
The direct operation command is available for each position No.
The positioning completion signal is output for each position No.
The actuator's effective main functions that can be controlled using this mode, are as shown in the following table.
PIO Pattern
Actuator Function
0:
Positioning
mode
1:
Teaching
mode
2:
256 point
mode
3:
512 point
mode
4:
Electromagnetic
valve mode 1
5:
Electromagnetic
valve mode 2
6:
Force
Control
Mode 1
7:
Force
Control
Mode 2
Homing
䂾
䂾
䂾
䂾
䂾
㬍
䂾
䂾
Positioning
䂾
䂾
䂾
䂾
䂾
䂾
䂾
䂾
Speed, Acceleration and
Deceleration Settings
䂾
䂾
䂾
䂾
䂾
䂾
䂾
䂾
Pitch Feeding (Inching)
䂾
䂾
䂾
䂾
䂾
䂾
䂾
䂾
Pressing Operation
䂾
䂾
䂾
䂾
䂾
㬍
䂾
䂾
Speed change during
the movement
䂾
䂾
䂾
䂾
㬍
䂾
䂾
㬍
Different Acceleration Speed,
Operation in Deceleration
䂾
䂾
䂾
䂾
䂾
䂾
䂾
䂾
Pause
䂾
䂾
䂾
䂾
䂾
䂾
(*1)
䂾
䂾
Zone Signal Output
䂾
䂾
䂾
㬍
䂾
䂾
䂾
䂾
PIO Pattern Selection
(Set using the parameters)
䂾
䂾
䂾
䂾
䂾
䂾
䂾
䂾
䂾
: Operation Available 㬍: Operation Unavailable
(*1) It is available when the parameter No. 27 “Movement Command Type” is set to “0”. Turning “OFF” the
“Movement Command” can stop the system temporarily.