Rockwell Automation SA500 Drive Configuration and Programming User Manual
Page 116
E-2
SA500 Drive Configuration and Programming
If application performance in the constant power region is at expected levels, you do
not need to perform the following calibration procedure.
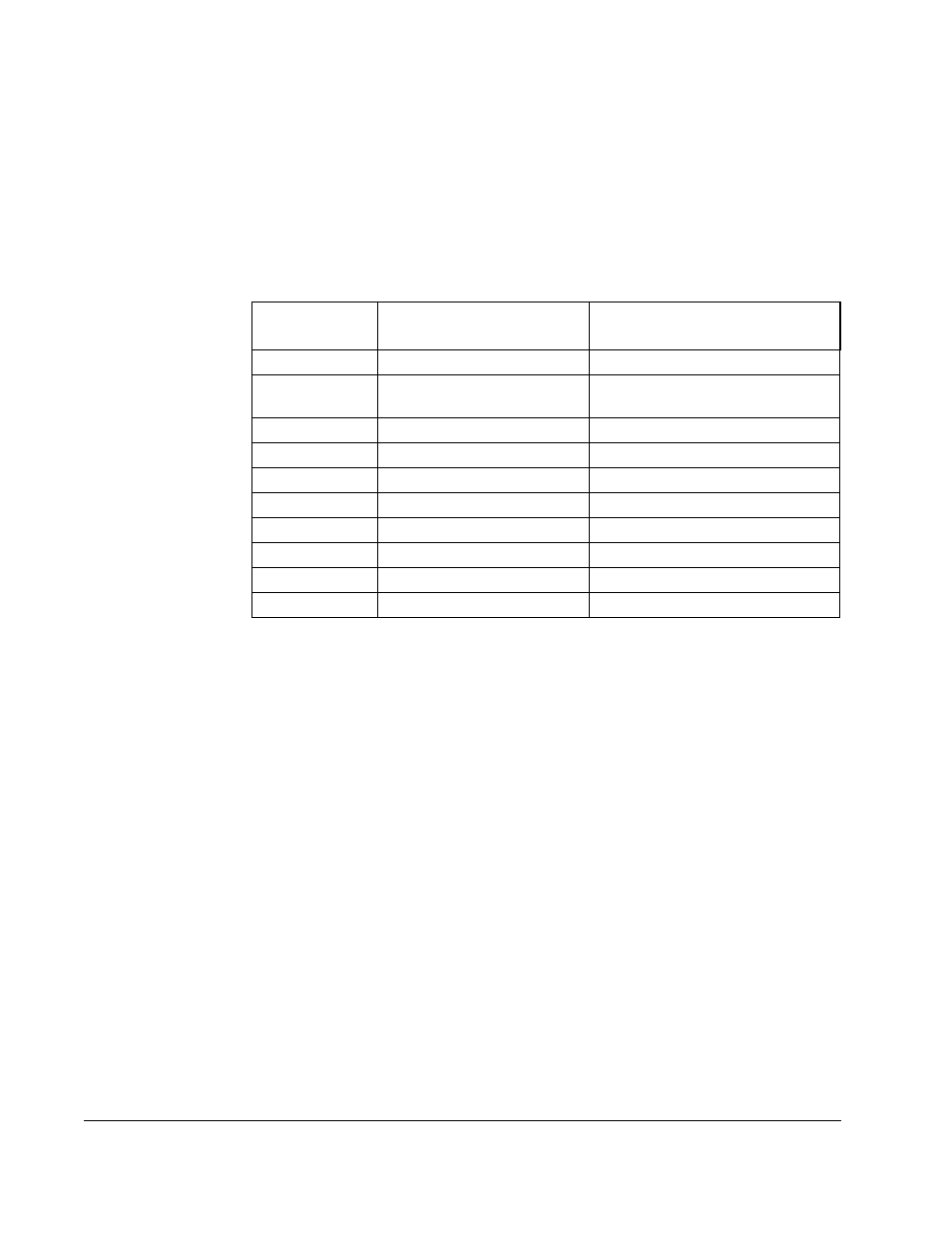
If application performance in the constant power region is not at expected levels, you
may be able to improve it by changing the Iz current values stored in the STATOR_IZ
tunables. See table E.1. The default current values were chosen to work with a wide
variety of motors. The performance of a specific motor may be improved by performing
the following calibration procedure. This procedure determines the motor’s custom
current values and stores them in the STATOR_IZ tunables.
Step 1. Turn off and lock out power.
Step 2. Disconnect the load from the motor.
Step 3. Connect an analog voltmeter across the motor terminals.
Step 4. Turn power on.
Step 5. Set Gear-in-Speed to four times the motor’s base RPM.
Step 6. Set Overspeed to 110% of Gear-in-Speed.
Step 7. Put the tasks in the rack into run.
Step 8. Set TUNE_IZ@ to 1 (register 101, bit 10).
Step 9. Verify that TUNED_IZ@ = 1. The STATOR_IZ reference table will then fill in
with default values.
Step 10. Reset TUNED_IZ@ to 0 (register 101, bit 10).
Step 11. Set NO_INTR@ to 1 (register 101, bit 0).
Step 12. Use the following equation to calculate the number of speed reference counts
that are equivalent to the motor’s base speed times the desired speed range
(1.1 to 4.0):
Table E.1 – STATOR_IZ Tunable Values
Reference
Point
1
1. The number of reference points used in the calibration procedure is dependent upon the motor’s base
speed times the speed range (1.1 to 4.0).
Speed Reference
(in counts)
Tunable Where the Iz
Current Value is Saved
1
409
STATOR_IZ0E2%
2
1023
(at maximum speed)
STATOR_IZ1E2%
3
1125
STATOR_IZ2E2%
4
1227
STATOR_IZ3E2%
5
1329
STATOR_IZ4E2%
6
1635
STATOR_IZ5E2%
7
1941
STATOR_IZ6E2%
8
2247
STATOR_IZ7E2%
9
2859
STATOR_IZ8E2%
10
4095
STATOR_IZ9E2%
4095 (Counts)
Gear
in
–
Speed RPM
(
)
–
---------------------------------------------------------------------
X (Counts)
Base Speed (RPM)
Speed Range
Ч
----------------------------------------------------------------------------------------------
=