Major fault messages – Rockwell Automation 1746-HSRV SLC Servo Control Module User Manual User Manual
Page 171
Publication 1746-6.1.2 - July 2000
10-12 Troubleshooting
Major Fault Messages
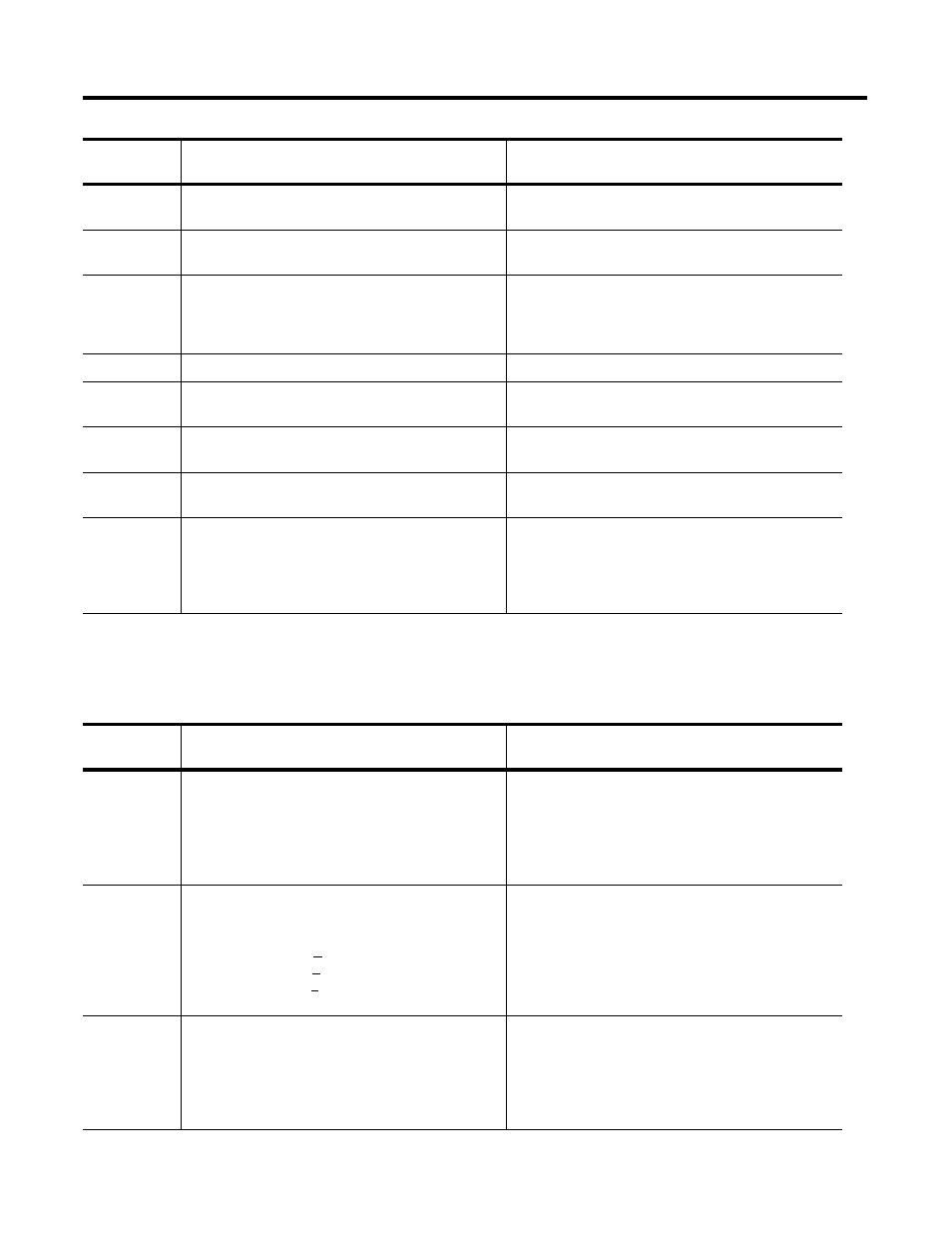
1063
The excess follower error is out of range.
If the excess FE is too big or too small, change the
parameter.
1064
The in position band is out of range.
If the in position band is too big or too small, change the
parameter.
1065
The loop type specified is out of range.
Valid loop types for the two bit field are:
00 - Open Loop
10 - FE Loop
01 - ZFE Loop (VFF)
1066
The home type specified is out of range.
Change the parameter.
1067
The positive overtravel limit specified is out of range.
The specified value caused an overflow error when
converting the parameter to internal resolution units.
1068
The negative overtravel limit specified is out of range.
The specified value caused an overflow error when
converting the parameter to internal resolution units.
1069
The counts per position unit specified is out of range.
The specified value caused an overflow error when
converting the parameter to internal resolution units.
1070
The fits per CIT is out of range.
The valid values are:
3 = 4.8 msec
4 = 6.4 msec
5 = 8.0 msec
6 = 9.6 msec
Minor Fault
Message No.
Potential Cause
Possible Resolution
Major Fault
Message No.
Potential Cause
Possible Resolution
2048
Quadrature fault: simultaneous transitions on the A and
B channels of the encoder detected. This error causes
an Estop state.
Because this fault is typically due to electrical noise
coupling onto the feedback lines:
1. Check to make sure the feedback cable is isolated
from electrical fields; and all relays, contactors,
and solenoids are adequately suppressed.
2. Rehome the system.
2049
The SLC Servo Module detected a feedback fault that
causes an Estop state. This occurs if the SLC Servo
Module detects one of the following in the same
electrical state:
•
channel
A and A
•
channel
B and B
•
channel
Z and Z
Because this fault is typically due to electrical noise
coupling onto the feedback lines:
1. Check to make sure the feedback cable is isolated
from electrical fields; and all relays, contactors,
and solenoids are adequately suppressed.
2. Rehome the system.
2050
The value of the axis following error exceeded the limit
established in the configuration file. This can be caused
by an obstruction to axis motion, servo wiring error, or
loss of feedback channel. This error causes Estop.
Reversal error is greater than maximum position
following error.
1. Reset from Estop.
2. If the problem persists, check axis mechanics,
wiring, and feedback devices.
3. Make reversal error smaller than maximum
position
following error.