Blending moves, Blending absolute moves – Rockwell Automation 1746-HSRV SLC Servo Control Module User Manual User Manual
Page 139
Publication 1746-6.1.2 - July 2000
8-22 Programming the SLC Processor to Run the SLC Servo Module
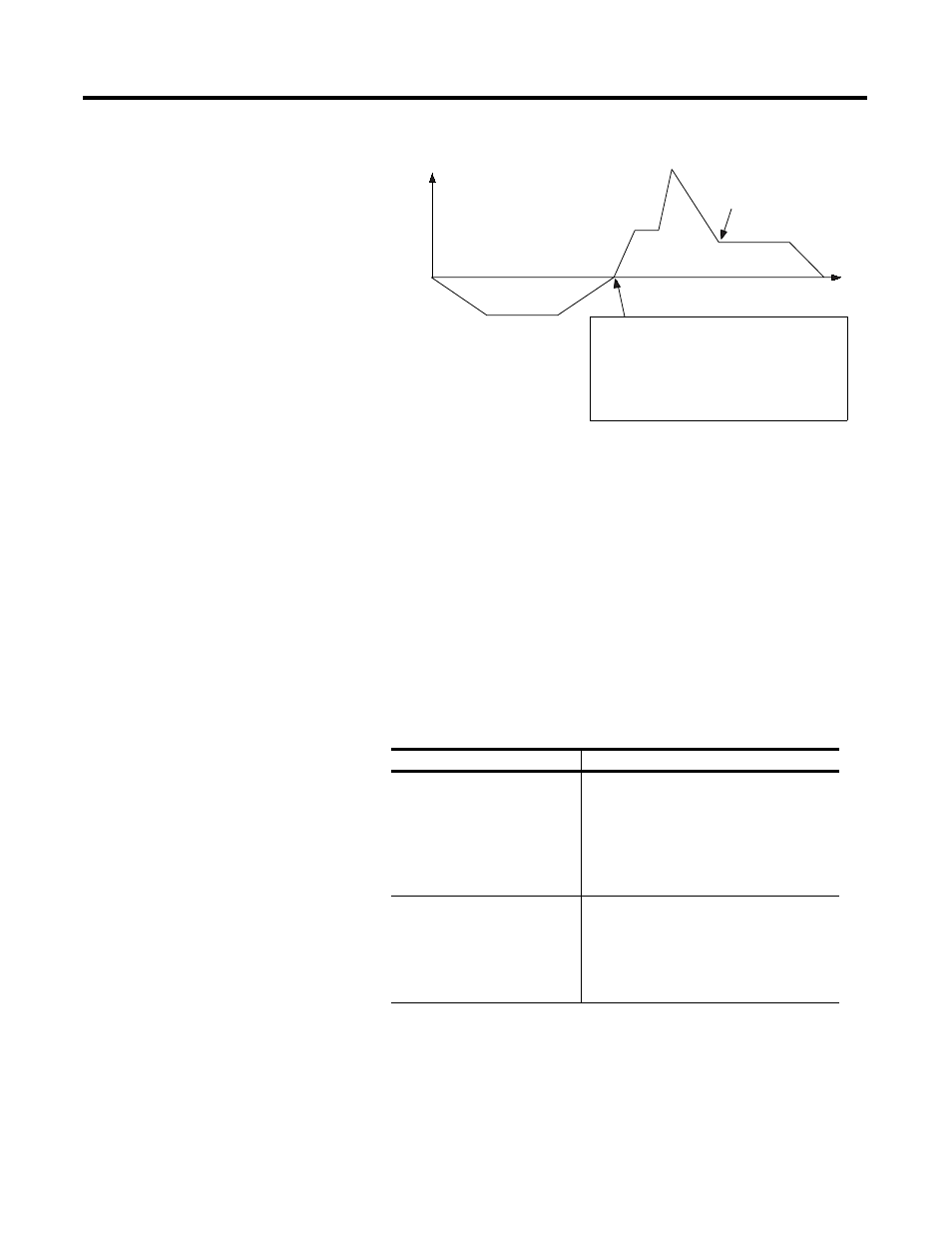
Figure 8.13 Speed Increases, Direction Opposite, End Point Less
Blending Moves
An executing move is considered complete when a new move is
commanded by the SLC processor. This allows you complete
flexibility to blend different moves from the ladder logic. If you
change the speed or acceleration after the deceleration has begun, the
move completes using the speed and acceleration that was active
when the deceleration began. This section describes several blend
rules.
Blending Absolute Moves
Blend move profile moves follow the same blending rules as absolute
moves because the blend profile moves are several absolute moves
specified as sequential moves.
Velocity
Time
Execute several
blend moves
0
0
end point for the new move.
The speed for the new move is opposite to
the speed for the current move.
End point of the current move.
The current move end point is less than the
If the current position is:
Then the axis:
Less than the target position
for the absolute move both:
•
when the new absolute
move is processed and
•
while executing any
currently executing
move
Direction is not reversed. It can accelerate
or decelerate to the new speed for the
move and then stop at the new target
position, as shown in Figures 8.14 and 8.15.
Greater than the target position Decelerates to the end point at the
specified deceleration rate of the old move.
The axis then reverses the direction and
executes at the new acceleration rate to
move to the new target position, as shown
in Figure 8.16.