2 status panel fault codes, 3 using the brake-release button, Brakes – Adept s650HS Quattro User Manual
Page 86
Chapter 5: System Operation
5.2 Status Panel Fault Codes
The Status Display, shown in Figure 5-1, displays alpha-numeric codes that indicate the
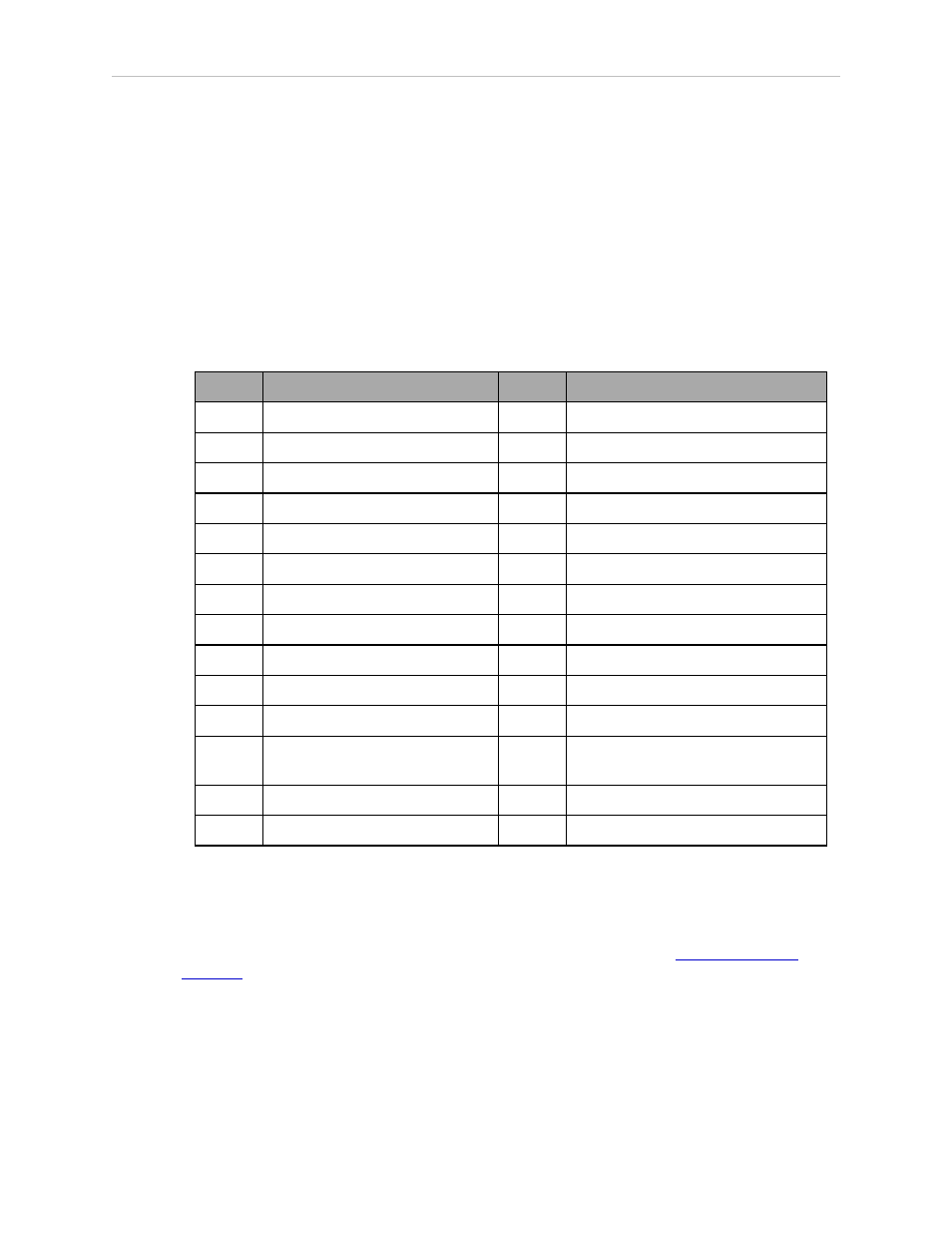
operating status of the robot, including fault codes. The following table gives definitions of the
fault codes. These codes provide details for quickly isolating problems during troubleshooting.
The displayed fault code will continue to be displayed even after the fault is corrected or
additional faults are recorded. All displayed faults are cleared from the display, and reset to a
no-fault condition, upon successfully enabling high power to the robot, or power cycling the 24
V supply to the robot.
Table 5-2. Status Panel Codes
Code
Meaning
Code
Meaning
OK
No Fault
H#
High Temp Encoder (Joint #)
ON
High Power ON Status
hV
High Voltage Bus Fault
MA
Manual Mode
I#
Initialization Stage (Step #)
24
24 V Supply Fault
M#
Motor Stalled (Joint #)
A#
Amp Fault (Joint #)
NV
Non-Volatile Memory
AC
AC Power Fault
P#
Power System Fault (Code #)
B#
IO Blox Fault (Address #)
PR
Processor Overloaded
D#
Duty Cycle Exceeded (Joint #)
RC
RSC Fault
E#
Encoder Fault (Joint #)
S#
Safety System Fault (Code #)
ES
E-Stop
SE
E-Stop Delay Fault
F#
External Sensor Stop
SW
Watchdog Timeout
FM
Firmware Mismatch
T#
Safety System Fault
(Code 10 + #)
FW
1394 Fault
TR
Teach Restrict Fault
h#
High Temp Amp (Joint #)
V#
Hard Envelope Error (Joint #)
NOTE: All joint numbers correspond to the numbers on the under-side of the robot
base.
For more information on status codes, go to the Adept Document Library on the Adept website,
and in the Procedures, FAQs, and Troubleshooting section, look for the
Adept Status Code
Summary
document.
5.3 Using the Brake-Release Button
Brakes
The robot has a braking system which decelerates the robot in an emergency condition, such
as when the emergency stop circuit is open or a robot joint passes its softstop.
Adept Quattro User's Guide, Rev F
Page 86 of 196