Mounting procedure from below the frame – Adept s650HS Quattro User Manual
Page 57
Chapter 3: Robot Installation - HS
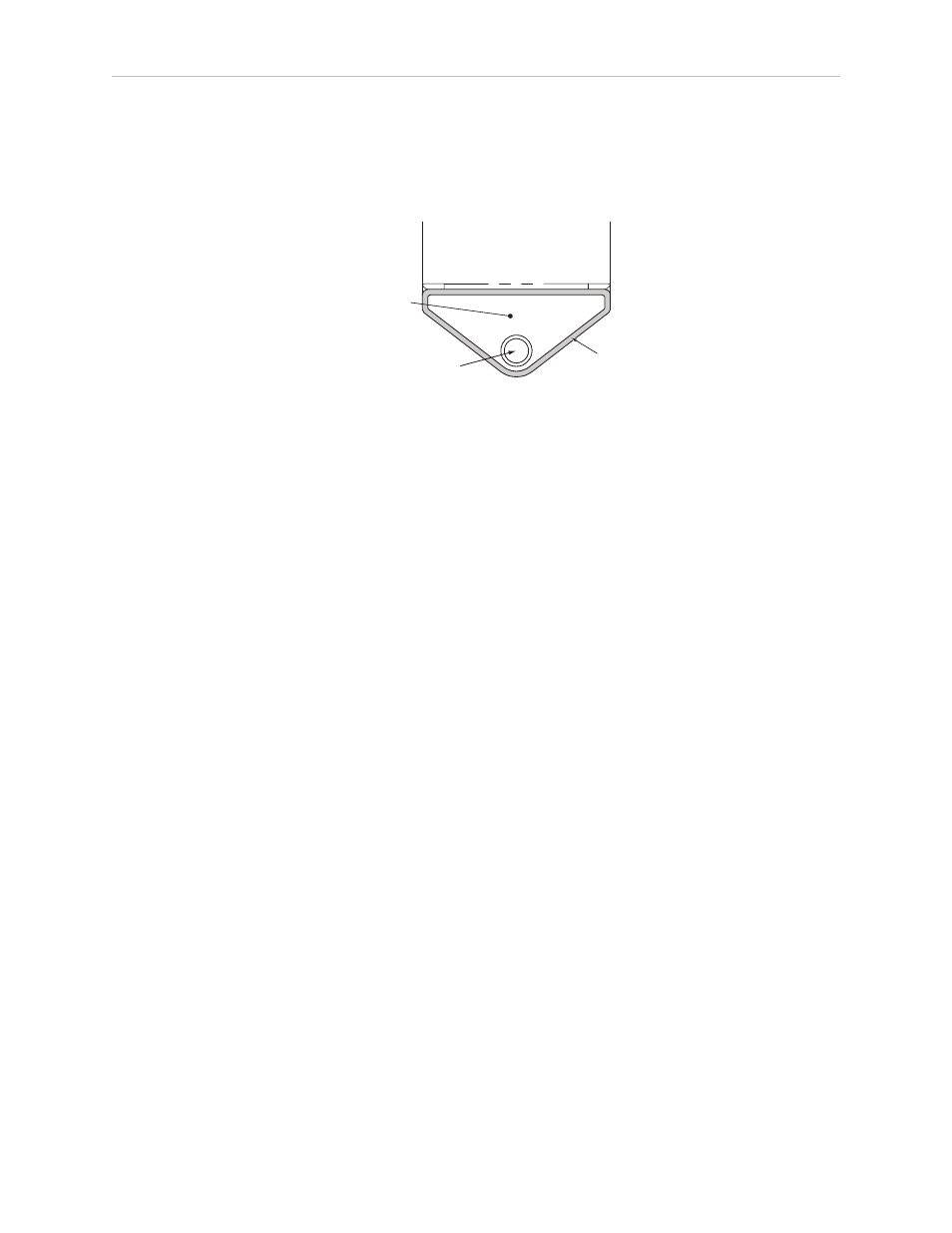
3. Insert a base-pad sealing-gasket into the groove machined in each robot base mounting
pad. The gasket and its positioning are shown in the following figure.
Sealing gasket
Robot Base
Raised Area
(limits gasket
compression)
M16
Hole
Figure 3-14. Robot Base Pad Sealing Gasket, Top View
The area of the mounting pad surrounded by the groove serves as a spacer, to
ensure that the sealing gasket is properly compressed.
4. Lift the robot and position it directly over the mounting frame.
5. Slowly lower the robot while rotating it slightly, so that the four mounting pads are
lowered past the frame mounting pads without touching.
6. When the robot base mounting pads are below the lower surface of the frame mounting
pads, rotate the robot base so that the M16 threaded holes in the robot base mounting
pads align with the holes in the frame mounting pads.
7. Lift the robot base up, keeping the holes in the robot base pads and the frame pads
aligned, until the sealing gaskets are touching the bottom surfaces of the frame
mounting pads.
8. Follow the instructions in Install Mounting Hardware on page 58.
Mounting Procedure from Below the Frame
The Quattro HS robot can be mounted from beneath the mounting frame using a forklift. Use a
padded board as a support under the robot base. The robot base can be rotated by hand, once
supported by the lifting pad on a forklift, when needed for clearing obstacles.
1. Remove all wood screws, machine bolts, and brackets securing the robot to the crate
before lifting the robot base.
Retain the removed hardware for future packing of the robot for relocation.
2. Insert a base-pad sealing-gasket into the groove machined in each robot base mounting
pad. The gasket and its positioning are shown in Figure 3-14.
3. Lift the robot and position it directly under the mounting frame.
4. Slowly lift the robot and align the M16 holes in the robot mounting pads with the holes
in the frame mounting pads.
5. Lift the robot base up, keeping the holes in the robot base pads and the frame pads
Adept Quattro User's Guide, Rev F
Page 57 of 196