2 cable parts list, 3 installing the smartcontroller motion controller, 4 connecting user-supplied pc to robot – Adept s650HS Quattro User Manual
Page 72
Chapter 4: System Installation
4.2 Cable Parts List
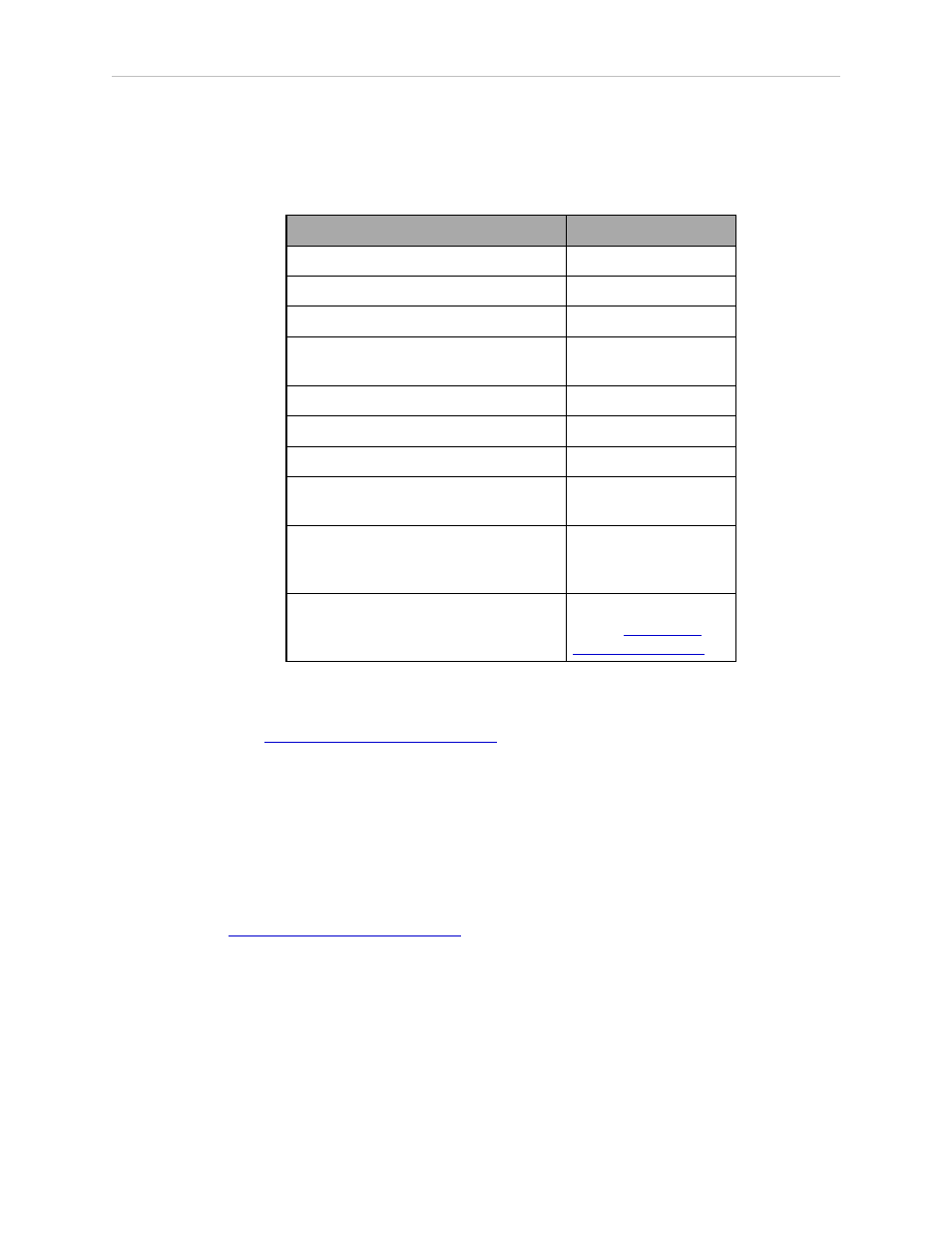
Table 4-1. Cable Parts List
Part Description
Part of
IEEE 1394 Cable, 4.5 M
All systems
XSYS Cable (AIB), 4.5 M
AIB
eAIB XSYS Cable (eAIB), 4.5 M
eAIB
eAIB XSLV Adapter Cable (eAIB),
250 mm
AIB to eAIB upgrade
Front Panel Cable
Front panel
T1/T2 Pendant Adapter Cable
Optional T2 pendant
T20 Pendant Adapter Cable
Optional T20 pendant
Power Cable Kit - contains 24 VDC
and AC power cables
Available as option
XIO Breakout Cable, 12 inputs/
8 outputs, 5 meter
Available as option—
see XIO Breakout
Cable on page 94
Y Cable, for XSYS cable connections
to dual robots - attaches at the
controller for an eAIB system
Available as option --
see the
Dual Robot
Configuration Guide
.
4.3 Installing the SmartController Motion Controller
Refer to the
Adept SmartController User’s Guide
for complete information on installing the Adept
SmartController. This list summarizes the main steps.
1. Mount the SmartController and front panel.
2. Connect the front panel to the SmartController.
3. Connect the pendant (if purchased) to the SmartController.
4. Connect user-supplied 24 VDC power to the controller.
Instructions for creating the 24 VDC cable, and power specification, are covered in the
Adept SmartController User’s Guide
.
5. Install a user-supplied ground wire between the SmartController and ground.
4.4 Connecting User-Supplied PC to Robot
The Adept Quattro robots must be connected to a user-supplied PC for setup, control, and
programming. The user loads the Adept ACE software onto the PC and connects it to the robot
via an Ethernet cable.
Adept Quattro User's Guide, Rev F
Page 72 of 196