B&G H2000 Pilot *DISCONTINUED* User Manual
Page 92
h2000 User Manual
92
HB-0845-06
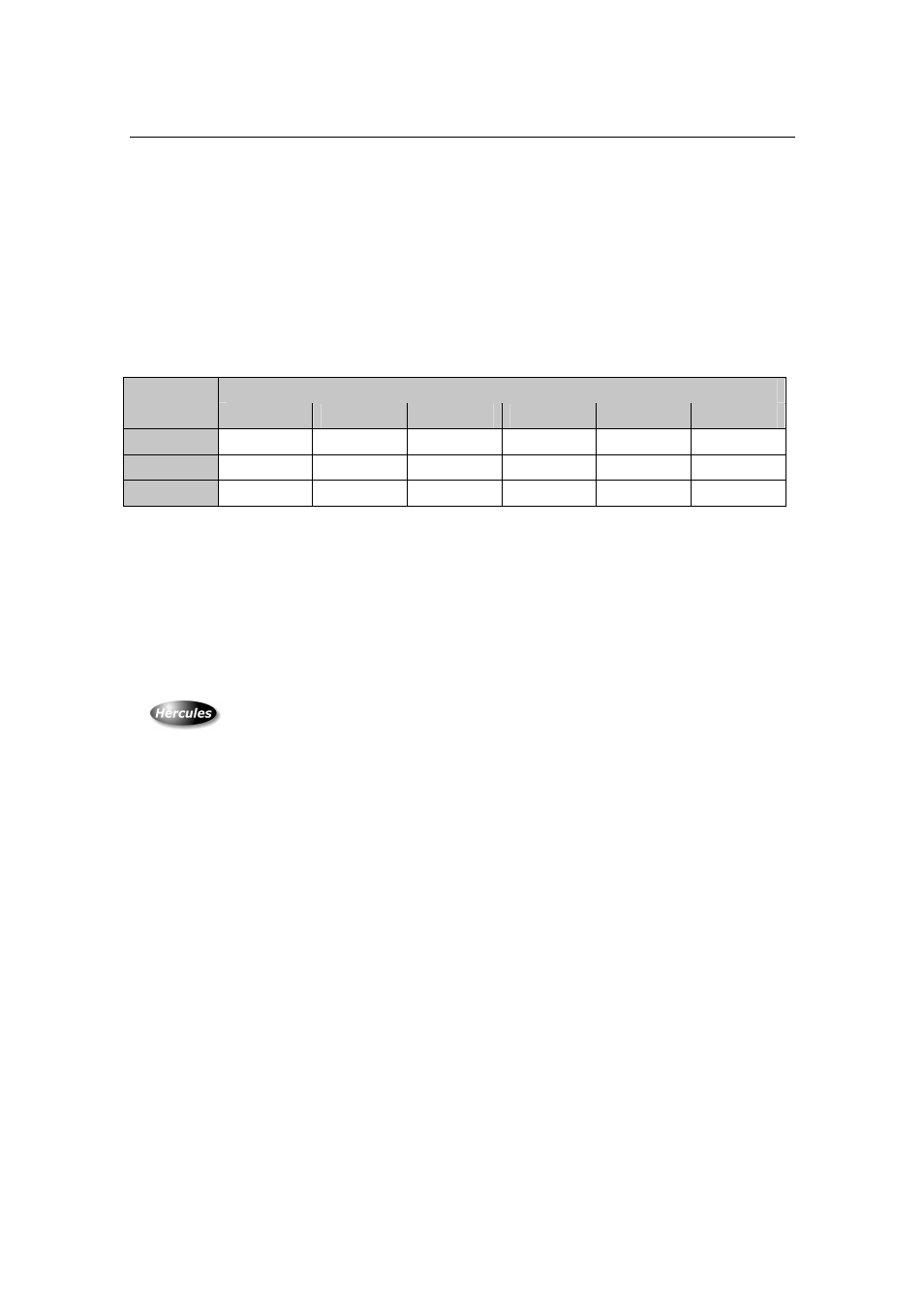
Heel Angle corrections apply to all types of sensor and are
actually due to the change in water flow patterns over the
surface of the hull rather than the sensor characteristics.
The procedure to enter correction values is as follows:
SPEED
→
BOAT SPD, CALBRATE
→
→
→
→
CORRECTN
Boat Speed (Knots)
Heel
5
10
15
20
25
30
0º
0.0 -2.0 -3.9 -6.0 -7.8 -9.3
10º
-0.2 -2.3 -4.0 -6.5 -9.6 -11.0
20º
-0.4 -3.9 -6.1 -8.5 -11.5
-13.3
Values are entered as a percentage. All default values are
zero.
3.2.12 Substituting Speed Over Ground for Boat
Speed
It is possible to substitute Speed Over Ground (SOG) in
place of Boat Speed for calculated functions. This may be
desirable for certain applications such as fast multi-hulls
where the speed sensor may spend periods of time out of the
water. It could also be used in the case of sensor failure.
Note that using SOG for calculated functions has some
disadvantages: SOG is not the same as Boat Speed as it is
referenced to the ground rather than the water, which may
be moving due to tidal flows and currents, so SOG will not
allow calculation of Tide. Calculation of Wind data via
SOG will actually give Ground Wind data, so will appear
inaccurate in strong tidal conditions. SOG is also updated
less frequently on the network.
The speed source setting is entered under:
SPEED
→
BOAT SPD, CALBRATE
→
→
→
→
USE SOG
0 = Use Paddle wheel sensor