B&G H2000 Pilot *DISCONTINUED* User Manual
Page 109
HB-0845-06
109
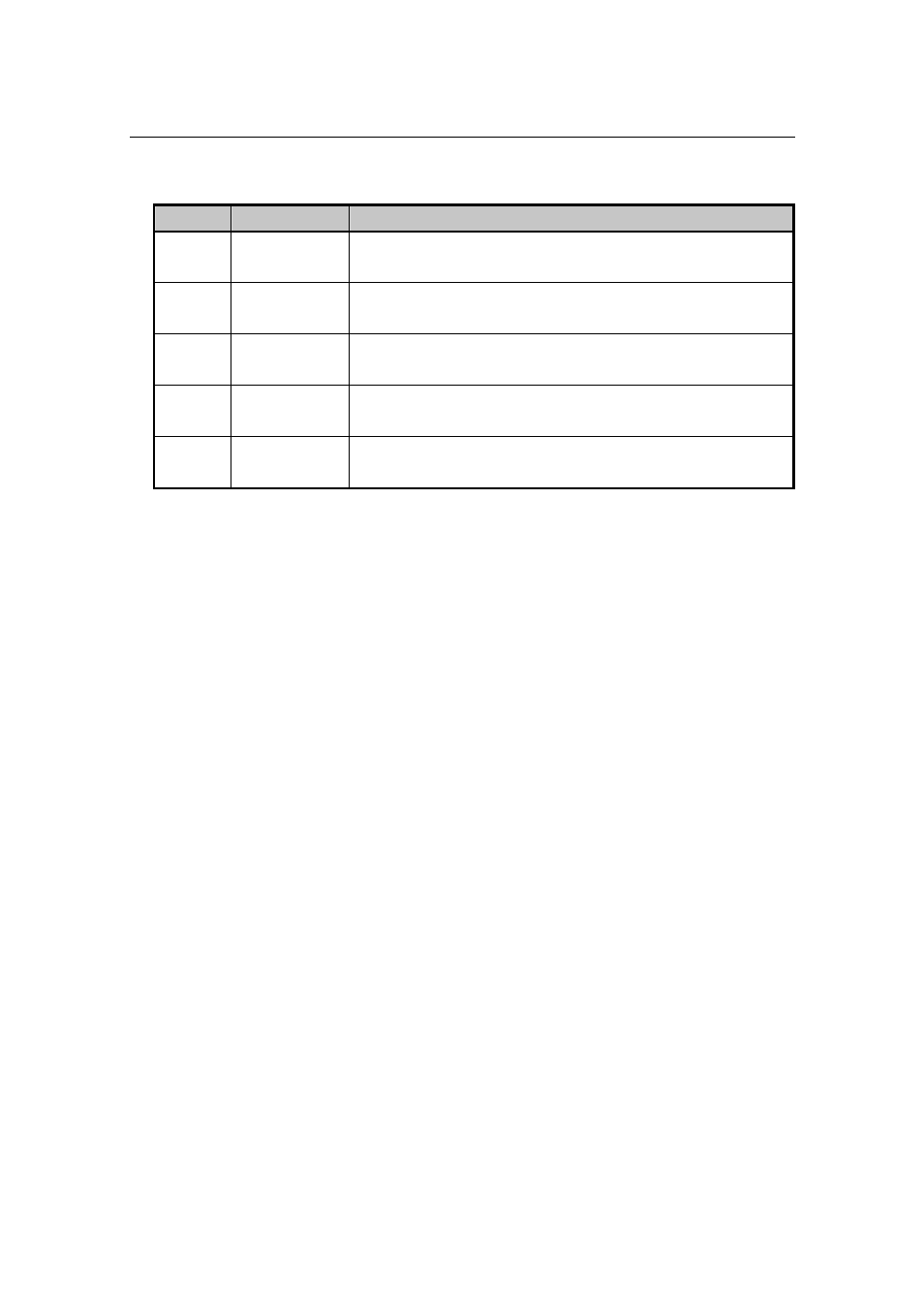
Mode
Output
Details
0
HDT
from Halcyon Gyro Stabilised Compass or
NMEA input to Halcyon Gyro Processor
1 HDM
from Halcyon Gyro Stabilised Compass or
NMEA input to Halcyon Gyro Processor
2 HDG
from Halcyon Gyro Stabilised Compass or
NMEA input to Halcyon Gyro Processor
3 HDM/HDT
from a B&G system [compass or NMEA input
to FFD]
4 HDG
from a B&G system [compass or NMEA input
to FFD]
Notes
•
Mode 0 is the default value
•
Mode 3 will output the correct sentence depending on
configuration.
Navigate
→
Heading, CALIBRATE
→
→
→
→
CAL VAL 2
0
=
Magnetic
1 = Auto (ºT if mag. variation available, otherwise ºM)
•
If Mode 4 is selected and magnetic variation is not
available then only the magnetic heading will be output.
3.6 HEEL
ANGLE/LEEWAY
CALIBRATION
Calibration of Heel Angle and Leeway is only necessary if a
Heel Angle Sensor (Clinometer) or Halcyon Gyro-Stabilised
Compass is fitted to the yacht.
3.6.1 Heel
Angle
The Heel Angle sensor (clinometer) should be mounted to
read zero when the boat is upright. However, small
misalignments can be corrected by means of the heel angle
calibration.