Control loop gains and other parameters, Control loop gains, And other parameters – Rockwell Automation Motion Analyzer Software User Manual
Page 246: Wind
246
Rockwell Automation Publication MOTION-UM004B-EN-P - October 2012
Chapter 3
Understanding Your System Solution
3.2.2.4.3. Control Loop Gains and other Parameters
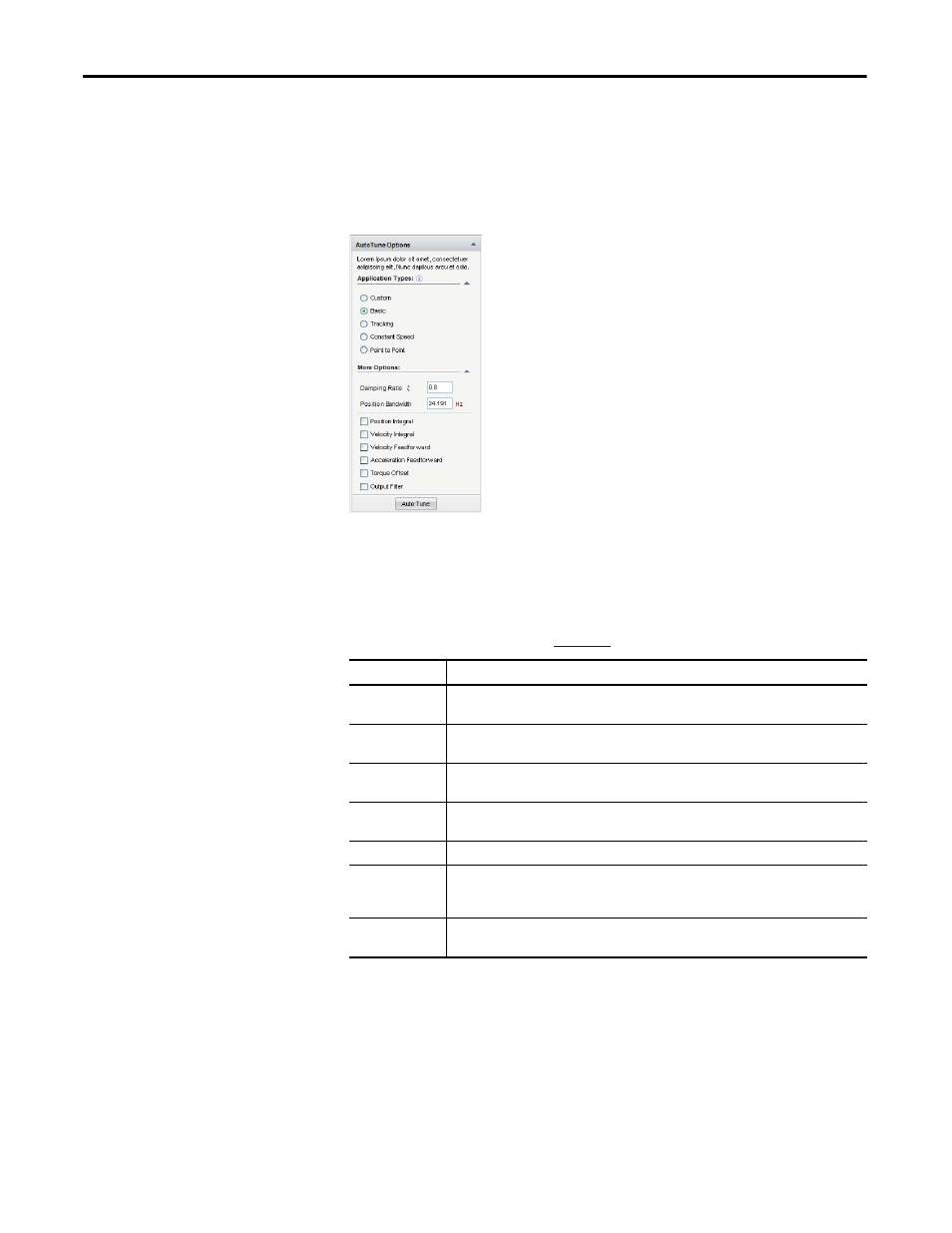
Control loop gains and other parameter windows let you manually enter control
loop gains or perform auto-tuning.
Figure 187 - AutoTune Options (expanded)
AutoTune Options simulate the Logix function by setting the Load Inertia Ratio
and the appropriate gains based on measured system inertia. As per the Logix
convention, there are five different application types for AutoTune. Selecting an
application type selects the gain parameters.
Table 142 - AutoTune Options (refer to
)
Options
Description
Basic
When selected, position proportional and velocity proportional gains and load inertia ratio are
calculated.
Constant Speed
When selected, velocity integral and velocity feedforward are calculated apart from the position
proportional, velocity proportional, and load inertia ratio.
Point to Point
When selected, position integral is calculated apart from the position proportional, velocity
proportional, and load inertia ratio.
Tracking
When selected, velocity integral, velocity feedforward, and acceleration feedforward are
calculated apart from the position proportional, velocity proportional, and load inertia ratio.
Custom
Use for custom/manual selection of the gain parameters to be calculated.
Damping Ratio
The default damping ratio value is 0.8. This is the classic single-overshoot setting. Higher values
cause the system to be softer. This may help if the standard value results in an axis that is too hot
or even unstable.
Position Bandwidth
This sets to the default for the drive/motor combination selected. It may be overridden
downwards to soften the response or get to a stable condition.