Electric cylinders – Rockwell Automation Motion Analyzer Software User Manual
Page 186
186
Rockwell Automation Publication MOTION-UM004B-EN-P - October 2012
Chapter 2
Sizing Your System
2.3.6. Electric Cylinders
The MP-Series™ and TL-Series™ electric cylinders provide flexible, digital, servo
control of a rod actuator (linear control of force/clamping or position). They
provide an electromechanical system for applying digital servo control with a
familiar fluid power format. The cylinders are integrated into machines with the
same fluid power application principals, mounting methods (for example,
trunnion mounts, rear clevis attachment kits, front flanges) and rod end
attachments for connected loads (for example, rod eye and clevis).
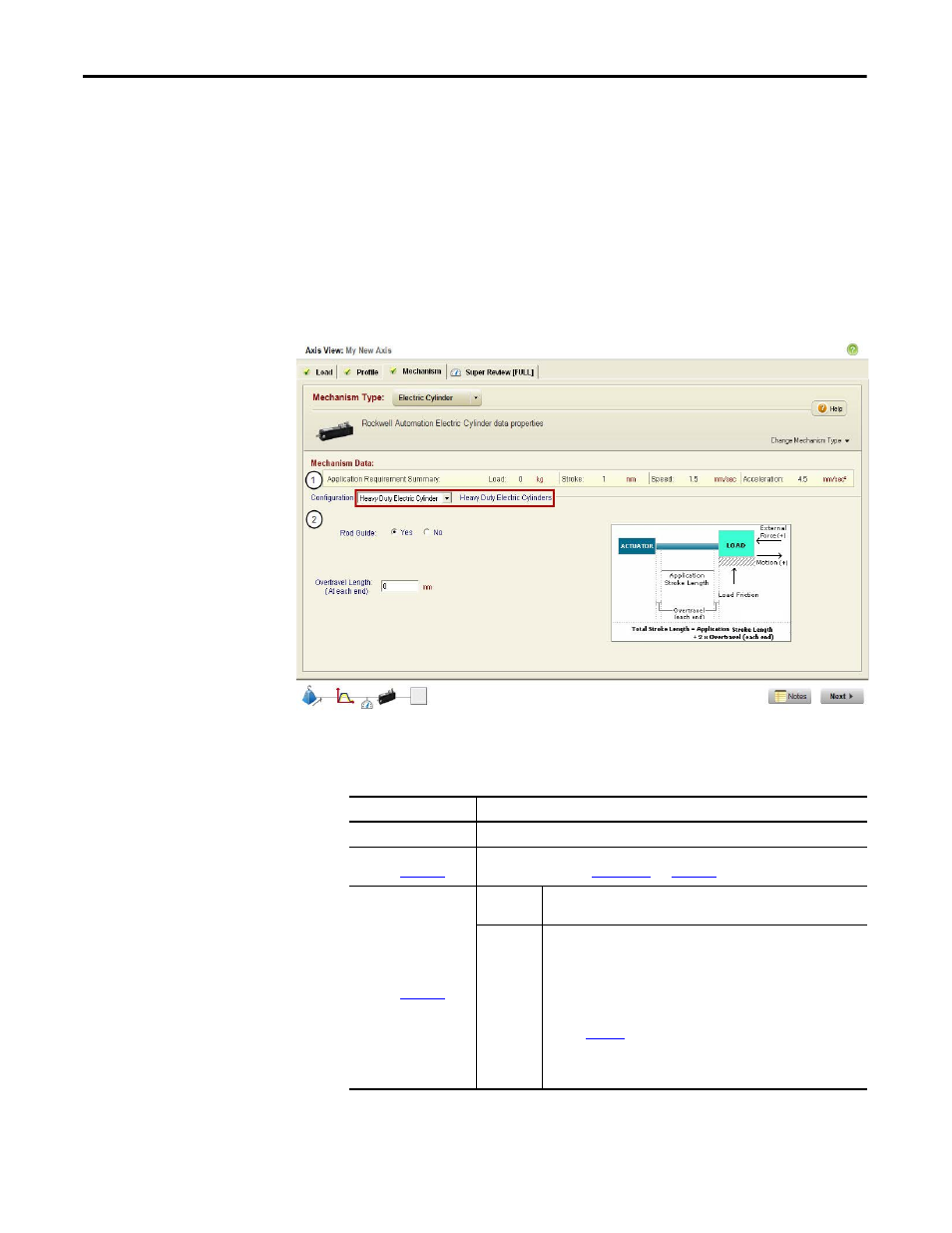
Figure 137 - Electric Cylinders Dialog Box
Enter the following parameters for electric cylinder mechanisms, if relevant.
Table 108 - Electric Cylinder Properties
Parameters
Description
Mechanism Type
From the pull-down menu, choose the mechanism type.
Mechanism Data
(label 1 in
The Load, Stroke, Speed, and Acceleration values are calculated based on the parameters
entered previously in the
and
, and displayed here for reference.
Electric Cylinder
(label 2 in
Rod Guide
This accessory is used when the cylinder shaft is exposed to moment (Mx,
My, Mz) and/or lateral side loading (Fy, Fz).
Overtravel
Length
This is the additional length of travel at each end of the motion profile to
allow for user-defined machine movements outside of the motion profile
(for example, setup of a mechanism or tool change spacing). It also
allows room for the motor to stop if it accidentally exceeds the nominal
travel. Switches (physical or software) detect this and the drive performs
a controlled stop. Once you have entered your motor and drive
requirements, and have searched for possible solutions for your system,
click the
tab to determine the minimum stopping distance
required. This is added to both ends of the calculated motion profile travel
to make sure the proper length electric cylinder is specified and selected
for the application.