Clear a type 1 fault and restart the drive – Rockwell Automation 294D ArmorStart LT Distributed Motor Controller DeviceNet Version - User Manual User Manual
Page 149
Rockwell Automation Publication 290D-UM001A-EN-P - June 2012
149
Bulletin 290D/291D/294D Programmable Parameters
Chapter 4
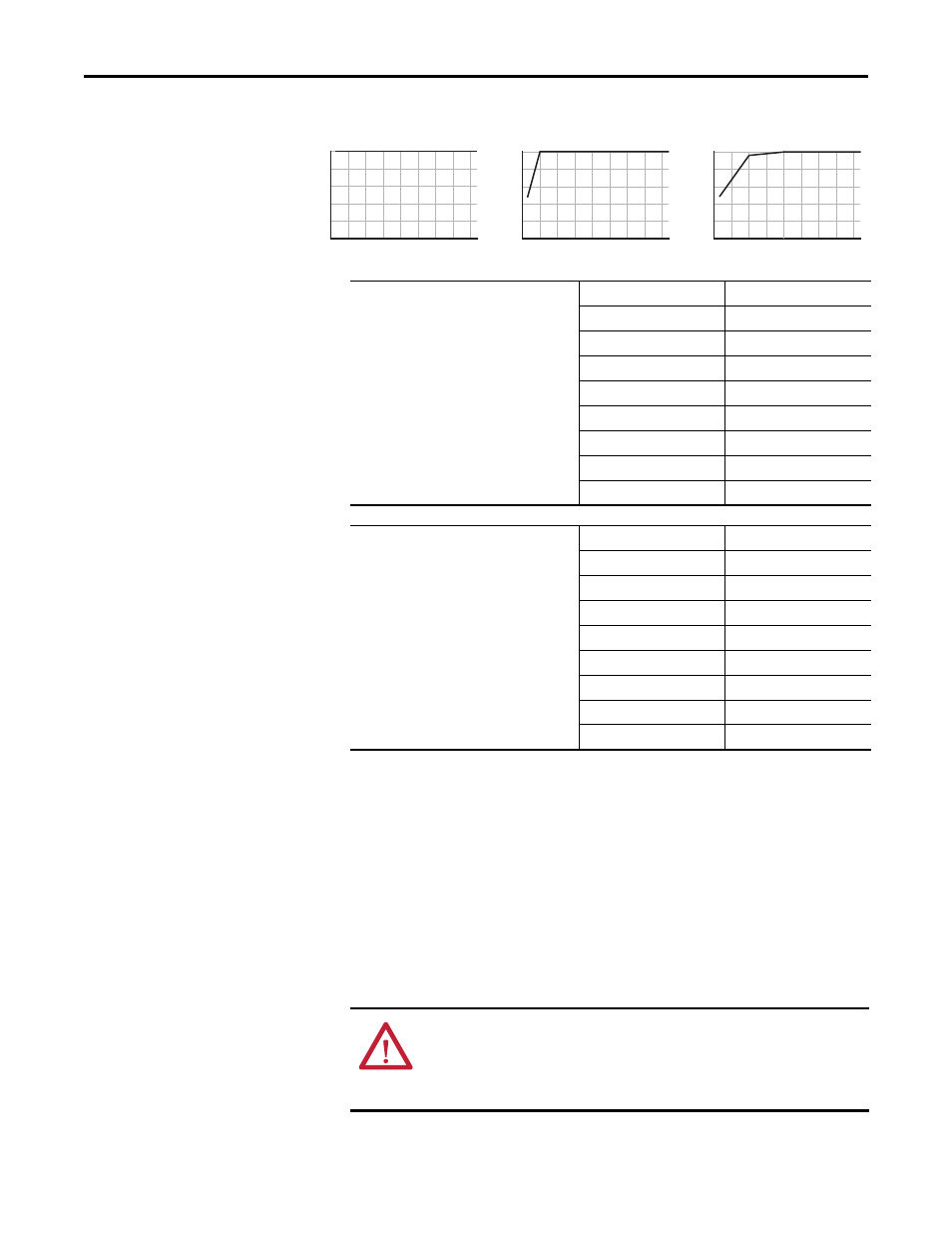
Figure 37 - Overload Trip Curves
Clear a Type 1 Fault and Restart the Drive
1.
Set Parameter 84 (AutoRestartTries) to a value other than 0.
2.
Set Parameter 85 (AutoRestartDelay) to a value other than 0.
Clear an Overvoltage, Undervoltage, or Heatsink OvrTmp Fault without Restarting the Drive
1.
Set Parameter 84 (AutoRestartTries) to a value other than 0.
2.
Set Parameter 85 (AutoRestartDelay) to 0.
Min. Derate
0
80
100
60
40
20
% of Motor Overload Current (P30)
No Derate
0
80
100
60
40
20
% of Motor Nameplate Hertz (P29)
% of Motor Overload Current (P30)
% of Motor Nameplate Hertz (P29)
% of Motor Overload Current (P30)
% of Motor Nameplate Hertz (P29)
Max. Derate
0
80
100
60
40
20
0
200
175
150
125
100
75
50
25
0
200
175
150
125
100
75
50
25
0
200
175
150
125
100
75
50
25
SWCurrentTrip
Enables/disables a software instantaneous
(within 100 ms) current trip.
For 0.5 Hp units – Min = 0; Max = 3.0; Default = 0
For 1.0 Hp units – Min = 0; Max = 5.0; Default = 0
For 2.0Hp units – Min = 0; Max = 8.4; Default = 0
Parameter Number
83
Related Parameter
30
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
x.x Amps
Minimum Value
0.0
Maximum Value
Hp Dependent
Default Value
0.0 (Disabled)
AutoRstrtTries
Set the maximum number of times the drive
attempts to reset a fault and restart.
Parameter Number
84
Related Parameter
85
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
—
Minimum Value
0
Maximum Value
9
Default Value
0
ATTENTION: Equipment damage and/or personal injury may result if this
parameter is used in an inappropriate application. Do not use this function
without considering applicable local, national, and international codes,
standards, regulations, or industry guidelines.