Rockwell Automation 294D ArmorStart LT Distributed Motor Controller DeviceNet Version - User Manual User Manual
Page 137
Rockwell Automation Publication 290D-UM001A-EN-P - June 2012
137
Bulletin 290D/291D/294D Programmable Parameters
Chapter 4
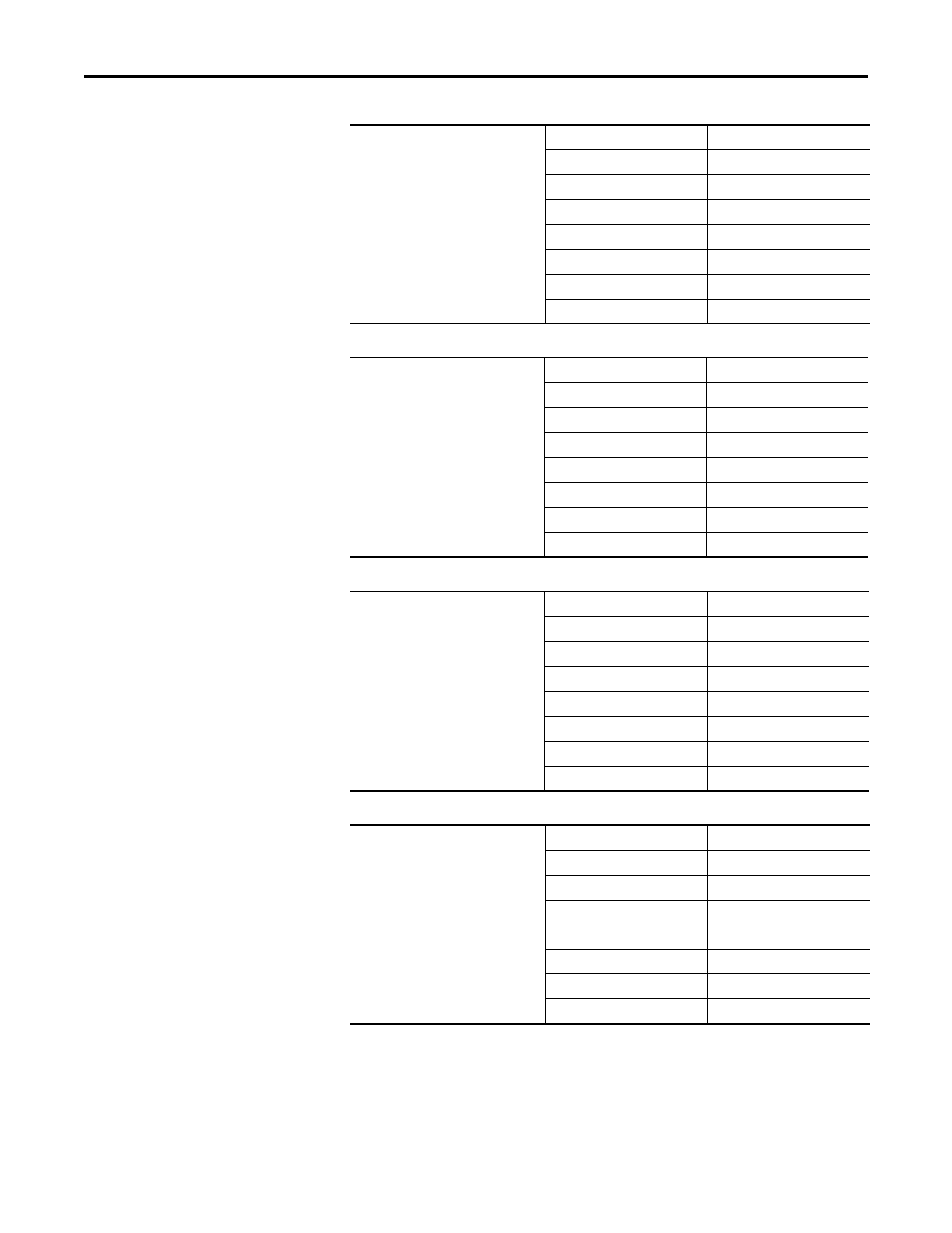
ProtectFltReset
This parameter resets a Protection Fault
by setting the bit to 1.
0 = NoAction
0 > 1 = ResetFault
Parameter Number
44
Access Rule
GET/SET
Data Type
BOOL
Group
Starter Protection
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0
RunNetFltAction
This parameter in conjunction with
Parameter 46 (RunNetFltValue) defines
how the starter will respond when a
network fault occurs as determined.
0 = GoToFaultValue
1 = HoldLastState
Parameter Number
45
Access Rule
GET/SET
Data Type
BOOL
Group
Starter Protection
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0
RunNetFltValue
This parameter determines how the starter
will be commanded in the event of a fault.
State the starter will go to on a NetFlt if
Parameter 45 (RunNetFltAction) = 1
(GotoFault-Value).
0 = OFF
1 = ON
Parameter Number
46
Access Rule
GET/SET
Data Type
BOOL
Group
Starter Protection
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0
RunNetIdlAction
This parameter in conjunction with
Parameter 48 (RunNetIdlValue) defines
how the starter will respond when
a network is idle as determined
by Parameter 48.
0 = GoToIdleValue
1 = HoldLastState
Parameter Number
47
Access Rule
GET/SET
Data Type
BOOL
Group
Starter Protection
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0