Rockwell Automation 294D ArmorStart LT Distributed Motor Controller DeviceNet Version - User Manual User Manual
Page 148
148
Rockwell Automation Publication 290D-UM001A-EN-P - June 2012
Chapter 4
Bulletin 290D/291D/294D Programmable Parameters
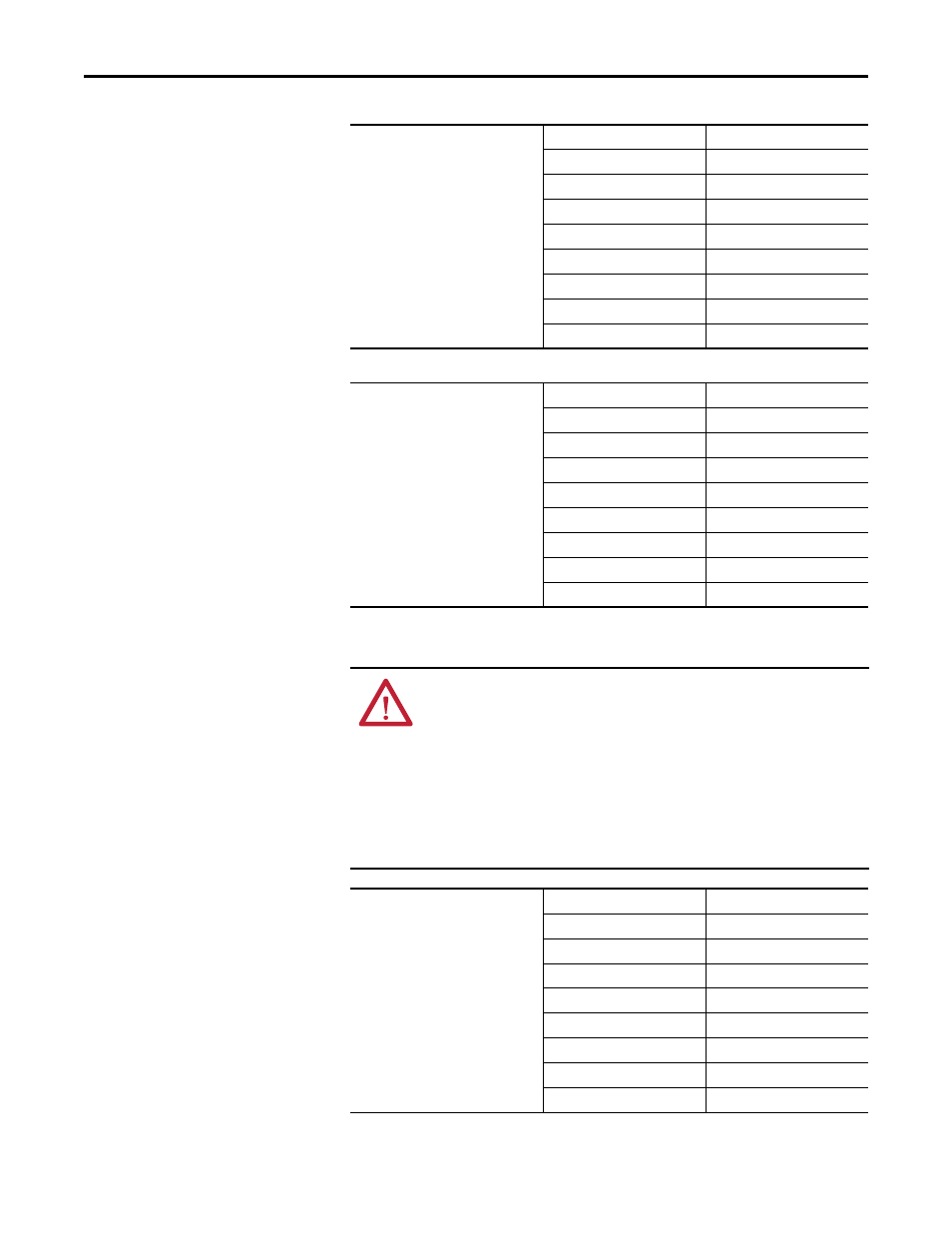
SlipHertzAtFLA
Compensates for the inherent slip in an
induction motor. This frequency is added
to the commanded output frequency
based on motor current.
Parameter Number
80
Related Parameters
30
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
x.x Hz
Minimum Value
0.0 Hz
Maximum Value
10.0 Hz
Default Value
2.0 Hz
BusRegulateMode
Controls the operation of the drive voltage
regulation, which is normally operational
at deceleration or when the bus voltage
rises.
0 = Disable
1 = Enabled
Parameter Number
81
Related Parameters
—
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0
ATTENTION: The bus regulator mode function is extremely useful for
preventing nuisance overvoltage faults resulting from aggressive decelerations,
overhauling loads, and eccentric loads. However, it can also cause either of the
following two conditions to occur.
1. Fast positive changes in input voltage or imbalanced input voltages can cause
uncommanded positive speed changes;
2. Actual deceleration times can be longer than commanded deceleration times.
However, a "Stall Fault" is generated if the drive remains in this state for 1 minute.
If this condition is unacceptable, the bus regulator must be disabled.
MotorOLSelect
Drive provides Class 10 motor overload
protection. Sets the derating factor for I
2
T
motor overload function.
0 = NoDerating
1 = MinDerating
2 = MaxDerating
Parameter Number
82
Related Parameters
29, 30
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Config.
Units
—
Minimum Value
0
Maximum Value
2
Default Value
0